74HC240制作寻光机器人
本文将给读者介绍我制作的另一部由74HC240作为主控核心的寻光机器人,依然贯彻低技术、低成本的制作理念,与大家共赏。
控制核心的深入分析
施密特触发器
施密特触发器的阀值电压决定了系统的给定值,施密特触发器的特性也就决定了这个系统的特性。因此有必要深入了解一下这个器件的特点。
施密特触发器是由美国科学家Otto Herbert Schmitt于1934年发明的,当时他只是一个研究生。事后三年,他在其博士论文中将这一发明描述为“Thermionic Trigger”。这一发明是他对鱿鱼神经中的神经脉冲传播进行研究的直接成果。在电子学中,施密特触发器是包含了正反馈的比较器电路。施密特触发器也有两个稳定状态,但与一般触发器不同的是,施密特触发器采用电位触发方式,其状态由输入信号电位维持;对于负向递减和正向递增两种不同变化方向的输入信号,施密特触发器有不同的阀值电压。施密特触发器是一种特殊的门电路,与普通的门电路不同,施密特触发器有两个阈值电压,分别称为正向阀值电压和负向阀值电压。在输入信号从低电平上升到高电平的过程中使电路状态发生变化的输入电压称为正向阀值电压,在输入信号从高电平下降到低电平的过程中使电路状态发生变化的输入电压称为负向阀值电压。正向阀值电压与负向阀值电压之差称为回差电压。对于标准施密特触发器,当输入电压高于正向阀值电压,输出为高;当输入电压低于负向阀值电压,输出为低;当输入在正负向阀值电压之间,输出不改变,也就是说输出由高电平翻转为低电平,或是由低电平翻转为高电平对应的阀值电压是不同的。只有当输入电压发生足够的变化时,输出才会变化。这种双阀值动作被称为迟滞现象,表明施密特触发器有记忆性,可用于在开环配置中的抗干扰。
改进版的控制核心
图2为改进版的寻光机器人,核心部分由一对光敏二极管和74HC240集成电路构成。74HC240是一片功能强大的三态缓冲器,芯片内部集成了8路带有施密特触发器输入特性的反向缓冲器。在数字计算机中,这类缓冲器的作用是用来暂时存放处理器送往外设的数据,有了数控缓冲器,就可以使高速工作的CPU部分与慢速工作的外设起协调和缓冲作用,实现数据传送的同步。这个改进版的寻光机器人,因为有了74HC240的加盟,使得机器人的控制系统即可以继承到上文所介绍的施密特触发器的全部好处,又可以借助缓冲器的作用,来协调机器人电子部分与机械结构之间的配合。实际制作完成以后的机器人运行方式,介于模拟控制与数字控制之间,因此它的设计者也给它起了一个形象的名字“Bare Bones Photovore”,我把它翻译为“准系统寻光机器人”。线路图中的U1和U2分别各代表了74HC240芯片内一组并联工作的驱动器。
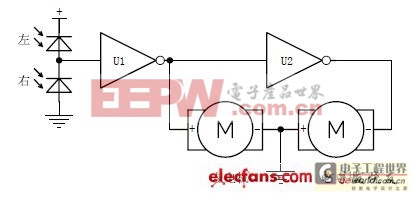
图2 74HC240寻光机器人线路图
图3是74HC240的框图,可以看到芯片内部由两组带有使能输入端的反向缓冲器组成,输入端和输出端分别为A1, A2, A3,A4, B1, B2, B3, B4(对应管脚2, 4, 6, 8, 11, 13, 15, 17);YA1,YA2, YA3, YA4, YB1, YB2, YB3, YB4(对应管脚 18, 16, 14, 12, 9, 7,5, 3)。使能输入端为Enable A, Enable B (对应管脚1, 19),电源正(对应管脚20),电源地(对应管脚10)。
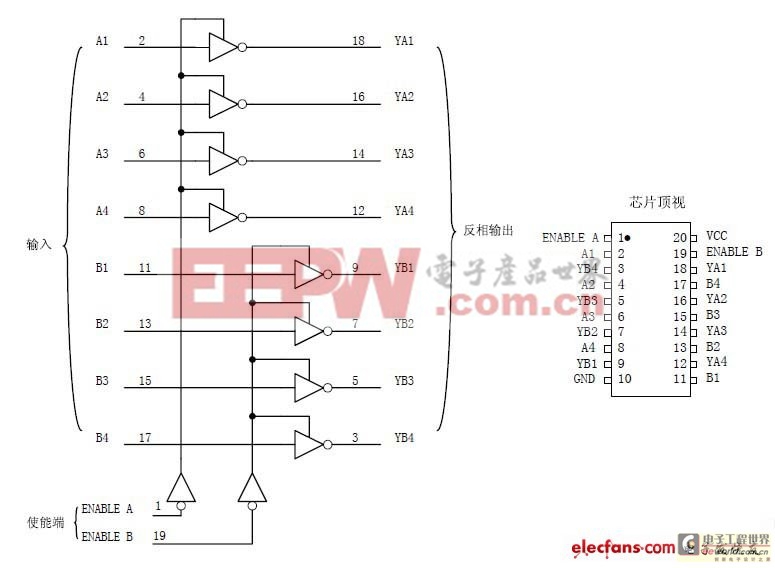
图3 74HC240内部图
缓冲器分为两种,常规缓冲器和三态缓冲器。常规缓冲器总是将值直接输出,用在推进电流到高一级的电路系统。三态缓冲器除了常规缓冲器的功能外,还设置有使能输入端,这里对应的是74HC240的第1脚和第19脚。从图4的真值表中可以看出当使能端电平不同时缓冲器有不同的输出值。当Enable A,Enable B=0时,芯片选通,缓冲器工作;当Enable A, EnableB=1,缓冲器被阻止,无论输入什么值,输出的总是高阻抗状态,用Z表示。高阻抗状态能使电流降到足够低,以致于类似缓冲器的输出没有与任何电路相连。

图4 74HC240真值表
在这部寻光机器人里,74HC240内部的缓冲器是工作在选通状态,故需要把芯片的第1脚、19脚接低电平(电源地),另外还需注意,74HC240内部缓冲器的单路输出电流只有35mA,在实际应用中,需要多组缓冲器并联以获得足够的输出电流,才能驱动减速电机安全有效的工作。我在制作中,使用2片74HC240,16只缓冲器分成两组各8路并联,U1和U2的输出端可以获得最大280mA的输出电流,足已驱动常见的小型减速电机。由此可以规划出一个系统的实际接线图,对制作很有帮助,见图5。
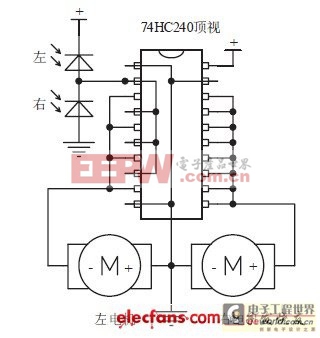
图5 74HC240寻光机器人接线图
机器人的实际制作
下面是我制作74HC240寻光机器人的过程。因为74HC240机器人移动平台的结构和制作方法与上一期的NE555寻光机器人相同,这里不再鳌述。见表1。

电子控制部分的全
- 12位串行A/D转换器MAX187的应用(10-06)
- AGC中频放大器设计(下)(10-07)
- 低功耗、3V工作电压、精度0.05% 的A/D变换器(10-09)
- PIC16C5X单片机睡眠状态的键唤醒方法(11-16)
- 用简化方法对高可用性系统中的电源进行数字化管理(10-02)
- 利用GM6801实现智能快速充电器设计(11-20)