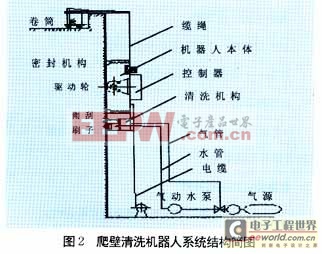
由上可见,机器人系统在工作时,地面控制器、机器人主体控制器、卷扬升降系统控制器,三者间必须相互协调,交换信息,才能保证机器人的正常运行。这种信息的交换正是使用P200控制器构成的电力线载波通讯模块,通过由地面拉上去的电力线进行电力线载波通讯完成的。
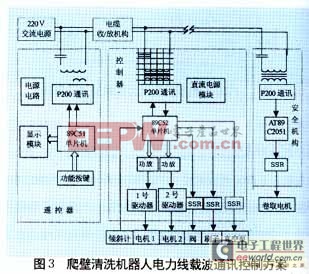
图3所示为壁面清洗机器人电力线载波通讯控制方案。当操作者按动地面控制器功能键发出工作指令时,单片机AT89C51把信息送到显示模块显示,同时经电力线载波通讯模块发送到电力线上。P200在发送指令信息时,附加上了地址号,由于主体控制器与卷扬控制器的P200模块具有不同的地址号,由地面控制器发来的信息只能被地址号相符的一方所接受。主体控制器与卷扬控制器也可把相应的现场信息反馈到地面控制器,当地面控制器收到反馈信息后,由于各模块地址唯一,会作出正确的解释,并及时地向发信方发出回执,现场控制器在收到回执后知道信息已收到,会自动停止发送反馈信息,否则发送反馈信息会定时进行。
5 电力线载波通讯模块在壁面清洗机器人联网运行中应用
在清洗一个复杂壁面时,为提高工效,可使用多台机器人联网运行。由于多台机器人都使用Intellon P200模块利用电力线通讯,如不采取措施,会发生信息传输的混乱[3]。为防止混乱在两方面要采取措施。其一:机器人与机器人之间通讯如何协调。其二:机器人各部分之间如何协调。从前述内容我们知道单台爬壁清洗机器人控制系统有地面控制器,主控制器,卷场升降控制器三大部分,事实上这三大部分的P200模块电路构成是完全相同的。都由一个主控单片机,一个P200模块,一个功率放大器及若干滤波器外围电路组成,为此我们设计了一个标准的嵌入式P200模块电路供所有功能模块使用,如图4所示。
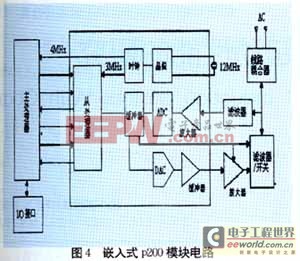
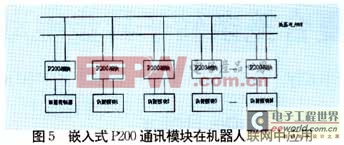
在这个模块电路中,使用了一个专用单片机AT89C2051[4]作为与外部控制电路的接口控制器,这个单片机专职服务于P200的双向通讯任务,在其ROM存储器中固化了本模块的二层地址信息,高层地址信息用一个字节记录了该模块是那个机器人的,低层地址信息用一个字节记录了该模块是属于机器人哪个功能部分的。这样在机器人联网时,我们可以对多个机器人只使用一台地面控制器,完成对各机器人各个部分的控制与测试任务。如图5所示在这个单片机网络中,只有地面控制器一台主机,其他功能模块全部为从属分机,因此该网络是主从式网络。另外在网络上已分不出整体的机器人、有效的仅是独立的功能模块,至于该模块属于哪个机器人,完成何种功能,完全由指令和相应的二层地址信息唯一地决定。注意,图5所示的P200通讯模块是完全独立的,其中包括的单片机AT89C2051仅完成双向通讯的接口任务,不参加各功能模块的具体工作,各功能模块的具体控制任务必须使用额外的单片机。每个P200通讯模块使用一个专用AT89C2051的好处,其一是可以减轻各功能模块的通讯工作压力,使通讯工作标准化。其二是P200内部的存贮器是易失的,其软件介面和二层地址信息都必须由Host Micro单片机上电时下载,故使用一个AT89C2051可以很好地完成这一任务,我们可以把P200的软件介面与二层地址信息事先固化在AT89C2051中,每次上电由AT89C2051向P200下载,使P200通讯模块与用户控制器完全独立。
6 结论
本文介绍了Intellon电力线载波通讯模块的技术特点及其在机器人控制技术中的应用。Intellon 技术的优越之处是既不象无线电通讯那样易受空间电磁信号的干扰或受无线电管制的约束,又不必铺设专用的通讯电缆,性能价格比较高。不足之处是由于使用公用的电力线,通讯系统是完全对外界开放的,易受来自电网的各种谐波干扰,稳定性与安全性目前还达不到专线通讯的水平。尤其对高频诸波的干扰,必须采取措施克服,以有效地提高通讯技术水准。
参考文献:
[1]lntellon SSC P200 PL Network Interface Controller Worksheet[S].USA:Intellon Co Ltd,1998
[2]D.Liu,E.flint,Wide Band AC Power Line Characterization[J].IEEE TRANSACTION ON CONSUMER ELECTRONICS,VOL.45,No.4,1999
[3]卢彬,等.电力系统通信网信号系统与接口技术[M].中国电力出版社,北京:1997
[4]余永权.FLASH单片机原理及应用[M].北京:电子工业出版社,1997
|