TMS320LF2407A基于CAN总线技术的数字交流伺服系
2、3屏蔽ID寄存器0SPLK#0FFFFH,LAM1_L;则ID必须匹配波特率设定主要与3个寄存器有关,即SCSR1(系统控制和状态寄存器1)、BCR1(位配置寄存器1)和BCR2(位配置寄存器2)。配置前要确定波特率和晶振频率,当对位定时器进行配置时,CAN控制器必须处于复位模式下,即CCR=1。SPLK#1000H,MCR;CCR=1改变配置请求W_CCE:BITGSR,#0Bh;等待改变配置使能BCNDW_CCE,NTC;当CCE=1时即可配置BCR2、BCR1寄存器SPLK#01H,BCR2;波特率预分频寄存器SPLK#0033H,BCR1;波特率设置为1MLACLMCR邮箱收发配置在数据域改变前首先要禁用邮箱,然后置位数据域,改变请求。再设置邮箱ID和信息控制寄存器。若是发送邮箱,则在数据域存放预发送数据,若是接收邮箱,则清空接收缓存。;写CAN邮箱内容前寄存器设置LDP#DP_CANSPLK#0040H,MDER;不使能邮箱,邮箱2设为接收方式SPLK#0103H,MCR;CDR=1,数据区改变请求;写CAN邮箱内容LDP#DP_CAN2SPLK#2447H,MSGID2H;设置邮箱2控制字及ID;IDE=0,AME=0,AAM=0;标准方式为MSGID2H[12~2>SPLK#0FFFFH,MSGID2LSPLK#08H,MSGCTRL2;设置控制域;数据长度DCL=8,RTR=0数据帧SPLK#00000H,MBX2A;邮箱2信息初始化SPLK#00000H,MBX2BSPLK#00000H,MBX2CSPLK#00000H,MBX2DSPLK#2447H,MSGID3H;设置邮箱3的标识符SPLK#0FFFFH,MSGID3LSPLK#08H,MSGCTRL3;RTR=0,DCL=8SPLK#02211h,MBX3A;邮箱3信息初始化SPLK#04433h,MBX3BSPLK#06655h,MBX3CSPLK#08877h,MBX3D;写CAN邮箱内容后寄存器设置LDP#DPCANSPLK#0480H,MCR;DB0=1,AB0=1,STM=0SPLK#04CH,MDER;ME3=1,MBX3发送,ME2=1接收SPLK#0F7FFH,CAN_IMR;中断MBX3无效,MBX2使能,;中断优先级SPLK#0FFFFH,CAN_IFR;清全部中断标志RET邮箱中断设置CAN模块专属中断寄存器有CAN_IFR和CAN_IMR,使用方法与一般中断寄存器相同。但TMS320LF2407A采用二级中断方式,高优先级模式的CAN邮箱中断对应INT1,高优先级CAN错误中断对应INT2;而低优先级CAN邮箱中断和CAN错误中断都对应INT5。所以在程序中要开放对应一级中断。接收帧ID的读入在接收事件中,通常一个邮箱要接收多节点郑因此,信息帧ID的读出也很重要。不管有没有屏蔽,所接收信息帧的ID会被置入MSGIDnH和MSGIDnL,但接收邮箱的ID并没有改变[5>。程序框图如图3所示,实验程序使用邮箱2接收,邮箱3发送。通讯软件可以采用查询方式或中断方式,主要包括CAN控制器初始化程序、接收邮箱与发送邮箱设置、发送程序、接收程序。
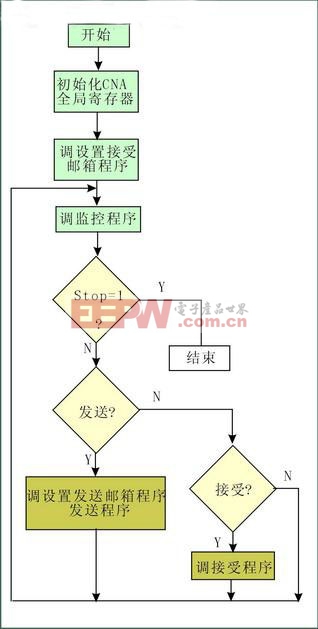
发送程序只需要设定发送控制寄存器相应位;接收程序要完成:读取已接收的邮箱标识符格式;读取接收的标识符;读取接收的数据长度;读取接收的数据值。上位机通过适配器与CAN总线连接,用VC6.0编写监控软件,并定义上位机作为局域网操作服务器,用户通过它可以对各个伺服单元进行操作。结语CAN总线具有良好的网络通信功能、高可靠性、抗干扰能力强且经济实用,是一种很有前途的现场总线技术。它的应用将为分布式运动控制提供一种新的解决方案,会受到人们越来越多的重视。新一代的智能数字伺服系统通过CAN总线于开放式数控系统互联,是运动控制领域发展的一个重要方向。
- 基于DSP的液晶显示若干问题的探讨(06-02)
- 应用DSP重复控制技术在逆变电源系统中的应用(10-14)
- 基于SPWM控制全数字单相变频器的设计及实现(11-16)
- 德州仪器1.5A 线性电池充电器可最大化AC 适配器与USB 输入功率(11-02)