基于三电平SVPWM的谐波控制算法的研究
摘要:针对有源电力滤波器(APF)谐波控制算法存在的问题,提出了一种基于三电平电压空间矢量脉宽调制(SVPWM)技术的谐波控制算法。该控制算法的功率开关频率低,输出谐波电压含量少,抗电磁干扰能力强,实时效果好。对该控制算法进行了Matlab仿真研究,通过实验成功地在APF中验证了其正确性,实验结果表明该控制算法具有谐波电压含量少,电压利用率高,补偿性能好等优点,同时证明了该控制算法的有效性和可行性。
关键词:有源电力滤波器;三电平;空间矢量脉宽调制;谐波控制
1 引言
谐波控制算法是APF中最重要的部分之一,它直接影响着APF的补偿效果。在三电平逆变器PWM控制方法中,SVPWM以其易于数字实现、电压利用率高、输出谐波成分少、脉动转矩低等优点而得到广泛应用。三电平SVPWM的拓扑结构特点使同样耐压水平的开关器件能够应用于中高压的大容量系统,提高了装置的等效开关频率;三电平逆变器输出为三电平阶梯波,更接近于正弦,减少了输出电压和输出电流的谐波含量。
在深入分析两电平拓扑结构的基础上,提出了三电平SVPWM在APF中的谐波控制功能。详细介绍了谐波控制算法的原理,并对算法进行了
Matlab/Simulink仿真验证,利用TMS320F2812完成了控制软件的编写。设计了基于TMS320F2812+CPLD的APF数字化控制系统,有效验证了谐波控制算法的正确性,提高了APF的实时补偿效果。
2 三电平SVPWM的工作原理
2.1 两电平SVPWM的拓扑结构
两电平SVPWM补偿信号产生过程如下:根据前端检测的三相谐波进行α,β坐标变换,在α,β坐标下进行扇区判断,求参考电压矢量Ur对应的相邻的基本矢量上的作用时间Tx,Ty,再确定空间矢量切换点Tcm1,Tcm2,Tcm3,这样就通过空间矢量切换点导通相应的开关器件产生谐波补偿信号的波形。两电平逆变器主拓扑结构图如图1所示。
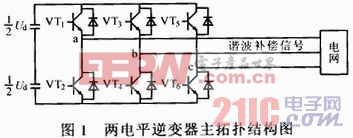
同一时刻三相逆变器每个桥臂上下两个开关器件的驱动信号互补,设Sk=1表示上桥臂导通,Sk=0表示下桥臂导通,可得各桥臂输出端电压Uk=SkUd(k=a,b,c),则电压空间矢量为:

空间电压矢量扇区划分如图2所示。以第I扇区为例,则:

式中:T为采样周期。
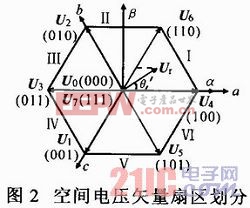
将Tx,Ty作3/2坐标变换到静止α,β两相坐标系下,则:
这一点在文献中做了详细的说明和验证。
2.2 三电平SVPWM的基本原理
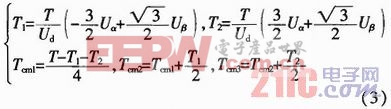
三电平逆变器是在两个开关器件串联的基础上加入一对中性点箝位二极管构成的,其电路拓扑结构如图3所示。
其中,每相桥臂的4个主开关管有3种不同的通断组合形式,即1表示+Ud/2,0表示0,-1表示-Ud/2的3种输出电位。27种开关组合状态对应着19个基本空间电压矢量,幅值2Ud/3, ·Ud/3,Ud/3和0分别对应着大矢量、中矢量、小矢量和零矢量。根据两电平矢量构成原理可得三电平的矢量图如图4所示。
·Ud/3,Ud/3和0分别对应着大矢量、中矢量、小矢量和零矢量。根据两电平矢量构成原理可得三电平的矢量图如图4所示。

当Uβ>0且 ,则Ur处于第I扇区(0θπ/3)。以此扇区为例,它含有大矢量U13=
,则Ur处于第I扇区(0θπ/3)。以此扇区为例,它含有大矢量U13= 和U0,中矢量U7=
和U0,中矢量U7= ,小矢量U1=
,小矢量U1= ,零矢量U0。将U1和U2的顶点连接起来,大扇区被分成A,B,C,D 4个区域。设Ur位于A区域中,U0,U1和U2分别对应作用时间为T0,T1,T2,Ur用U0,U1,U2的时间线性组合来近似等效,可得:
,零矢量U0。将U1和U2的顶点连接起来,大扇区被分成A,B,C,D 4个区域。设Ur位于A区域中,U0,U1和U2分别对应作用时间为T0,T1,T2,Ur用U0,U1,U2的时间线性组合来近似等效,可得:
U0T0+U1T1+U2T2=UrTs, T0+T1+T2=Ts (4)
式中:Ts为调制脉冲周期。

同理可求出其他小三角中矢量作用时间,在计算其他五大扇区的矢量作用时间时,只要将上式中的θ值分别用θ-60°,θ-120°,θ-180°,θ-240°和θ-300°来代替即可。
3 控制算法仿真
3.1 两电平SVPWM的仿真
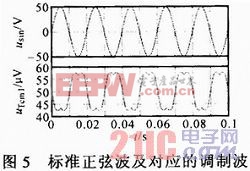
取三相a,b,c分别为只含有标准正弦波电源,通过仿真模型来观察空间矢量切换点Tcm1的调制波形,Tcm2,Tcm3相位依次相差120°和240°,波形与Tcm1相同。Tcm1的波形如图5所示。由图可知,仿真得到的调制波形与输入波形满足相位相反的原则。
3.2 三电平SVPWM的仿真
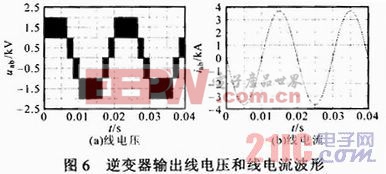
三电平仿真输入也是采用标准正弦波,整个系统主要包括各区域判断、小三角判断、矢量合成时间计算、触发脉冲的分配等环节。逆变器输出的线电压uab,线电流iab波形如图6所示。
4 软件设计
根据上述三电平SVPWM基本算法原理,在开发的基于DSP+CPLD的数字化控制系统中,由于DSP芯片集成度高,方便谐波的采样和控制计算;而CPLD速度快,且I/O端口多,CPLD开发平台采用MAX+PLUS II平台,基于Verilog HDL硬件描述语言开发程序,两者结合可以保证多组触发脉冲的实时同步。控制系统中DSP进行谐波信号的采样和控制计算,CPLD完成端口的扩展以及接收DSP运算的时间和PWM波。软件算法流程如图7所示。

5 实验
此处开发设计了一套由DSP(TMS320F2812)+
- 基于SVPWM的航空高功率因数整流器设计(08-15)
- 基于SVPWM算法的变频调速系统设计方案(10-20)
- 适用消费电子的三电平H桥输出D类放大器(03-29)
- 基于SG3525电压调节芯片的PWM Buck三电平变换器(05-16)
- 一种基于软开关三电平DC/DC开关电源的研制(01-06)
- 一种基于三电平的单级PFC电路设计(12-03)