具有娱乐和安防功能的智能机器人设计方案
接过两个1N5819 和一个104 独石电容进行包络线检测,最后利用LM358 作为电压比较器,利用1 K 电阻和880Ω电阻分压获得比较电压值,其电路如图5 所示。 机器人的移动采用驱动直流电机带动轮子转动实现,即控制直流电机的正反转和速度,系统直流电机驱动芯片采用SGS 公司的L298N,内部有4 通道逻辑驱动电路。用三极管组成H 型平衡桥,驱动功率大,驱动能力强。同时H 型PWM 电路工作在晶体管的饱和状态与截止状态,具有非常高的效率。 电机的转速取决于3 个因素:负载、电压和电流。对于一个给定的负载,可以通过脉冲宽度调制的方法来使电机保持稳定的速度。通过改变施加在直流电机上的脉冲宽度,可以增加或减小电机的转速。调整脉冲宽度,即改变占空比,调整电机的速度。驱动板采用6 个高速光耦6N137 实现驱动电路与逻辑电路的隔离,这样可以有效地避免驱动电路与逻辑电路之间的相互干扰。驱动板的电路原理图如图6 所示。 通过软件编程可以自由改变单片机两路PWM脉冲信号的占空比,电机的A 端连接PWM 脉冲信号,电机的B 端连接单片机的一个I/O 引脚。当这个I/O 引脚置1 时,电流从电机的B 端流向电机的A 端;当这个I/O 引脚置0 时,电流从电机的A 端流向电机的B 端,这样电机就可以改变电机旋转方向,同时控制PWM 脉冲信号的占空比值还可以改变电机旋转速度,实现转向和转速的控制。通过I/O引脚控制电机旋转方向的示意图如图7 所示。 3 软件设计 软件设计主要包括上位机控制界面的设计以及单片机的编程。如图8 所示,即为用VB 设计的系统上位机控制界面,就串口开发而言,VB 提供了串口通信控件MSComm,通过对此控件的属性和事件进行相应编程操作,就可以轻松地实现串口通信。 单片机的编程则包括电机驱动编程、音乐播放编程、蓝牙收发编程等,这里截取电机驱动部分程序为例,如下所示。 4 结语 这里介绍了基于英飞凌16 位单片机XE162FN的多功能智能机器人的硬件和软件设计。该设计的创新之处在于将智能机器人的娱乐功能和实用的安防功能相结合,有人在家时,它是一个功能强大互动性强的玩具,无人在家时它是家中卫士,时刻监控家中情况,并且可以通过短信方式报告。 更多资讯请关注:21ic模拟频道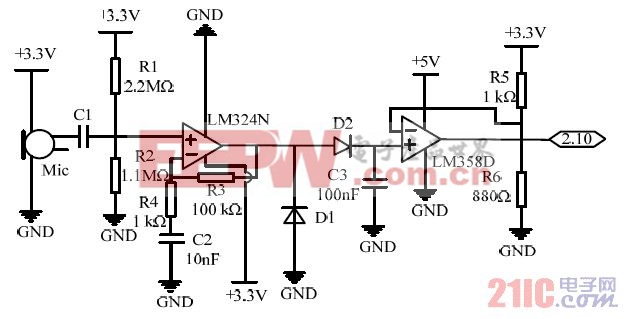
图5 拍手信号捕获电路
图6 直流电机驱动电路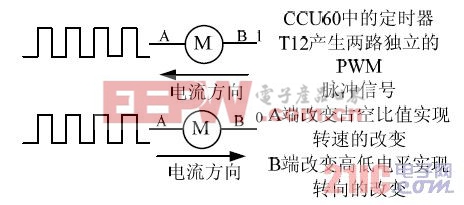
图7 I/O 引脚控制电机旋转示意
图8 上位机控制界面
- UHF RFID读写器的设计方案(一)(12-03)
- 让设计方案满足未来之需(09-30)
- 51单片机设计方案TOP10(十)(05-22)
- 51单片机设计方案TOP10(九)(05-22)
- 51单片机设计方案TOP10(八)(05-22)
- 51单片机设计方案TOP10(七)(05-22)