多传感器融合定位在高速铁路的应用1
时间:09-10
来源:互联网
点击:
以卡尔曼滤波能适用于任何平稳或非平稳随机向量过程的估计,所得估计在线性估计中精度最佳。目前已经开发的滤波算法包括线性卡尔曼滤波,扩展卡尔曼滤波以及联邦卡尔曼滤波。该方案采用联邦卡尔曼滤波进行数据融合。
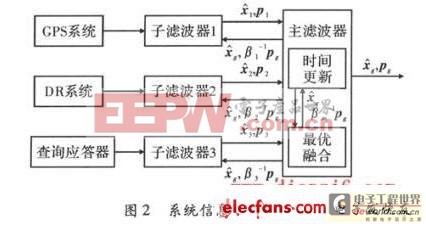
2.2.1 数据融合的联合卡尔曼滤波模型
此滤波算法中,取βm=0,即主滤波器没有信息输入,进一步优化系统,减少了运算量。
- 声发射源多传感器数据融合识别技术(11-27)
- 多传感器融合定位在高速铁路的应用2(09-10)
- LabVIEW平台下的多传感器空气流量测试设计(09-10)
- 12位串行A/D转换器MAX187的应用(10-06)