基于PLC的交通灯自动控制系统
0 引言
随着自动化控制技术和微电子技术的迅猛发展,PLC作为前沿的工业控制器,具有体积小、可靠性高、易操作、灵活性强、抗干扰能力强等一系列优点,广泛用于自动化控制领域。用内部编程取代继电器逻辑控制电路中大量的中间继电器和时间继电器,简化了控制路线,提高了系统控制的可靠性,这是PLC最大的优点。借助于书序控制图和梯形图来编制用户控制程序,实现自动控制系统顺序控制,是PLC的主要功能之一。
1 控制信号系统
在车水马龙的都市,当交通干道不便于挖掘地下通道或架设天桥的时候,为了穿越马路行人的安全,需要在指定的人行横道两端设置人行道口的的红绿灯。交通灯控制工艺:南北、东西向的十字路口,均设有红、黄、绿三只信号灯。六只灯依一定的时序循环往复工作,图1 为交通信号灯时序图。

控制交通信号灯的 PLC可选用 FX2N-32MR,从时序图可以看出,该系统有一个输入装置和 6个输出装置。表1 为输入装置与输出装置与PLC的地址编号对应表。

交通信号灯的控制是一个典型的时序控制图,其梯形图设计关键是各灯(Y0~Y5)状态变化的“时间点”表示出来、时间的精确计算用定时器实现,本例将用T0~T9共 10 个定时器;灯的闪烁次数要用计数器实现,本例将用两个计数器,表是各定时器和计数器形成时间点的使用说明。
2 顺序控制的概率及方法
PLC 是电子技术、计算机技术与继电逻辑自动控制系统相结合的产物,它以顺序控制为主,回路调节为辅,能完成逻辑判断、定时、记忆和算术运算等功能。PLC结构紧凑、体积小、操作方便、抗干扰能力强、编程灵活简单、工作安全可靠、能耗低等优点使其很快在工业自动化控制中占据主导地位,PLC外部接线简单方便,通过预先编制的程序来实现自动控制。
2.1 系统梯形图设计
开关 X0,选择开关按下以后程序开始循环启动,东西向绿1亮 25s,南北向红2 亮30s;T0 为绿 1 亮 25s 定时器,T0 设定值 K250,从 X0 接通起计时,计时时间到绿 1 断开,T1计时;T1、T2 为绿 1 闪动 3 次控制,T1、T2 形成振荡,T1 通时绿 1 亮,C0 计数;C0 为东西向黄1亮2s起点,T2为 C0计数信号,C0 接通时黄 1 点亮;T3为黄 1 亮 2s定时器,T3 设定值 K20,T3 设定值 K20,T3 接通时为红 1、绿 2 点亮,红 2 熄灭;T4 为红 1 亮 30s定时器,T4设定值K300,T4接通时红 1 熄灭,一循环周期结束。T5为绿 2亮 25s定时器,T5设定值 K250,从T3接通起计时,计时时间到绿2断开,T6计时;T6、T7为绿 2 闪动 3次控制,T6、T7 形成振荡,T6 通时绿 2 点亮,C1计数;C1 为南北向黄 2 亮 2s 起点,T7为 C1 计数信号,C0 接通时黄2 点亮;T8为黄 2 亮2s定时器,T8设定值 K20,T8接通时黄 2 熄灭,一循环周期结束。
2.2 顺序控制法
顺序控制是按照生产工艺预先规定的顺序,在各个输入信号的作用下,根据内部状态和时间的顺序,在生产过程中各个执行机构自动有秩序地进行操作。PLC 的设计者们继承了继电器顺序控制的思想,为顺序控制程序的设计提供了大量通用的和专用的编程元件和指令,开发了供设计顺序控制程序用的顺序功能图语言,使之成为当前 PLC程序设计的主要方法。 顺序控制设计法又称步进控制设计法, 它是一种先进的设计方法, 很容易被初者接受,有经验的工程师也会提高设计的效率,程序的调试、修改和阅读也很方便。
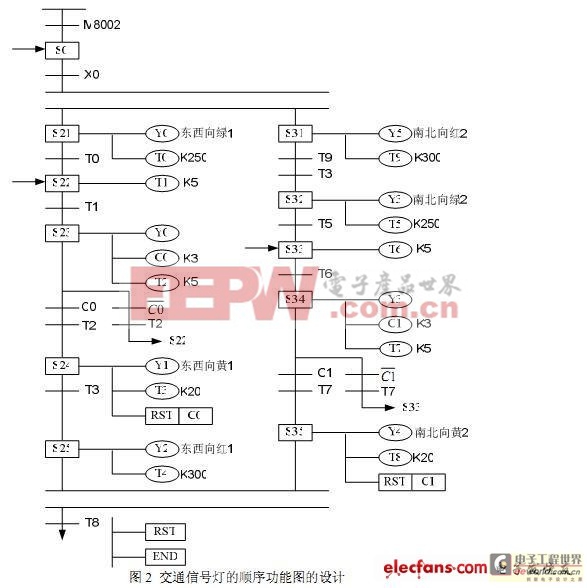
图 2 和图 3为交通信号灯的顺序功能图和步进梯形图设计。

这两个图有以下特点:
1)将复杂的任务或过程分解成若干个工序(状态)。无论多么复杂的过程均能分化为小的工序,这非常有利于程序的结构化设计。
2)相对于某一具体的工序来说, 控制任务实现了简化, 给局部程序的编程带来了方便。
3)整体程序是局部程序的综合,只要弄清各工序成立的条件、工序转移的条件和转移的方向,就可进行这类图形的设计。
4)状态转移流程图可读性强、容易理解,能清晰地反映工艺控制全过程。
状态转移图是状态编程法的重要工具。状态编程的一般思想为:将一个复杂的控制过程分解为若干个工作状态,弄清各状态的工作内容(状态的功能、转移条件和转移方向),根据总的控制顺序要求,将各独立状态联系起来,形成状态转移图,进行绘制梯形图程序,写出语句表。
2.3 经验梯形图设计法
下面将经验设计法和顺序控制设计法进行适当比较,以便设计时选用。采用经验设计法设计梯形图时,不可能找出一种简单通用的设计方法。
顺序控制设计法将整个程序分成了控制程序和输出程序两个部分。 由于步是根据输出Y的状态划分的,所以M和Y 之间具有很简单的逻辑关系,输出程序的设计极为简单
- 面向PLC的精密信号处理与数据转换器件(05-13)
- PLC控制的防电源短路的电动机正反转控制线路(07-04)
- 过程控制和PLC设计指南(06-28)
- 微控制器的24V接口(06-03)
- 用于I/O卡和PLC应用的4通道、灵活、可配置、电压和电流输出电路(06-10)
- 一种高转换效率高功率因素的大功率LED电源研究(03-08)