基于MSP430F149的变频伺服系统的设计
1变频伺服系统的功能
为达到变频伺服系统的运行可靠、良好的静态以及动态的性能要求,其功能如下:
1)精确的伺服控制功能
高精度、高速度、大功率是伺服系统的发展趋势,系统采用高速单片机作为核心控制器,对变频器进行控制,使伺服系统的控制达到更高的精度。
2)通信功能
单片机与上位机之间必须确保通信的正常与正确,单片机将接收到来自上位机的控制命令与采样到的反馈信号相比较得到偏移控制量,只有得到相应的偏移量,单片机才对变频器输出相应控制信号。
3)反馈量精确采集功能
反馈量采集的精确度直接关系到控制精度,系统采用变M/T方法对伺服电机进行转速采样,采样精度较M法、T法更加精确,从而确保了更加精确的控制。
2系统硬件设计
系统以单片机MSP430F149为核心控制器[2],集成变频器、变频电机、采样编码器以及PC上位机组成。其系统原理框图如图1所示。

图1系统框图
其控制过程为:单片机MSP430F149控制协调系统各功能模块工作;PC上位机通过串口UART0将控制信号传输给MSP430F149,单片机通过对反馈信号采样后进行处理,将处理后的数据与来自上位机的控制信号相互比较,得到误差量,再将误差量经过相应的运算得到伺服系统控制量;MSP430F149将得到控制量通过串口UART1直接转换成RS485信号输出至变频器,变频器根据接收到的控制信号产生变频变压的电源信号以驱动电机完成期望动作;同时上位机通过MSP430F149的串口UART0获取变频电机的速度、系统参数等形成打印报表,为操作人员良好人机操作界面。
2.1单片机单元
MSP430F149是变频交流伺服系统的核心控制器,完成系统控制信号与测量信号的传递及复杂的控制决策,协调各模块进行工作,操作控制指令的接收与识别。此单片机是一种超低功耗微控器,采用16位的体系结构,16位的CPU集成寄存器和常数发生器,实现了最大化的代码效率。包括2个内置16位的定时器、一个快速12位A/D转换器,两个通用串行同步异步通讯接口和48个I/O端口,片内包含60KFLASHROM和2KBRAM。本设计是实时控制系统,需对数据进行实时采集和传输。MSP430F149中60KFLASH存储器可满足系统程序对烧录存储空间的需要,内部数据RAM(2K)保证了数据实时采集、处理和传输,48个数字外设端口方便地实现了与外围器件的数据传输与控制,16位的体系结构保证了系统能够完成复杂的控制决策,而双串口UART则满足了控制器与上位机及变频器的实时通信需要。
2.2光电编码器及变M/T测速MSP430F149内部实现
伺服系统的精度控制主要取决于电机转速信号的测量精度,本系统采用增量式光电编码器作为电机转速为检测元件。比较常见的电编码器测速方法有M法、T法和M/T法。M法是在规定时间间隔内,测量光电编码器输出的脉冲数量来获得被测电机转速的速度值,适合高速测量场合。T法测量是测量相邻两个脉冲间隔时间来确定被测电机的转速速度的方法,此方法在高速场合测量时精确度性较差,因此一般只适用于低速测量的场合。M/T法是通过同时测量检测时间和在此检测时间内所发生的脉冲数来确定转速。在整个速度范围内有着较好的测速精度,但在低速时随着频率的降低,需要较长的测量时间,无法满足伺服系统的快速动态响应性能指标[2]。近年来变M/T测速方法逐渐被使用,是指在测速过程中,不仅检测光电编码器脉冲M1和高频时钟脉冲M2随电机转速不同而变化,而且检测时间Tg也在变化,它始终等于光电编码器M1个脉冲周期之和(测速原理如图2所示)。Tg的大小由高频时钟脉冲M2计取,则电机速度计可由以下公式确定[3]。

式中:M1为预置脉冲数;M2为高频时钟脉冲数;fc为高频时钟频率;λ为光电编码器倍频系数;P为光电编码器线数。
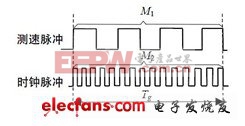
图2变M/T法测速原理
在电机低速运行时变M/T法的检测时间Tg明显比M/T法检测时间要短,由此可见用变M/T法转速测量能够满足控制系统对转速测量的精度及实时性
MSP430F149 变频伺服 相关文章:
- 12位串行A/D转换器MAX187的应用(10-06)
- AGC中频放大器设计(下)(10-07)
- 低功耗、3V工作电压、精度0.05% 的A/D变换器(10-09)
- PIC16C5X单片机睡眠状态的键唤醒方法(11-16)
- 用简化方法对高可用性系统中的电源进行数字化管理(10-02)
- 利用GM6801实现智能快速充电器设计(11-20)