浅谈如何利用廉价的铜布线实现大尺寸触摸面板(二)
选择铜/PET薄膜
基于以上研究,触摸面板研究所的研究人员认为,要想解决触摸面板大型化造成的透明导电性薄膜课题,在PET薄膜上形成金属网层的方法最合适,于是从 2009年起展开了开发。金属材料采用易采购、成本低、易加工的铜膜。这种方式制作的透明导电性薄膜被命名为“SpiderNet”。
制作网状图案需要缩窄网格的线宽,因此采用了光刻法。另外,考虑到低成本量产性,选择了能用卷对卷方式处理的干膜法。
铜/PET薄膜采用铜膜厚2μm的蒸镀薄膜。由于铜膜呈红色,原以为需要实施黑化处理,但缩小线宽的话就基本看不到了,所以无需在意颜色。使用湿法蚀刻的初期阶段产品,线宽为10μm左右。这个宽度的话,仔细看能看到。缩小铜线宽度后,铜与PET之间的粘着力会下降,容易剥落。因此,在蚀刻后连续涂布了透明保护层。
图5为网状图案示例。传感器部以1~2mm的间距设置了多条细铜线。结合这些细铜线形成一个传感器,与布线电极连接。该传感器以5~6mm 的间距配置。X传感器薄膜与Y传感器薄膜分别设置,利用光学粘合剂(OCA)粘合。制作的触摸面板从正面看有格子状的图案。

图5:采用铜网状图案方式透明导电性薄膜的触摸面板构造
在PET薄膜上绘制X、Y传感器线(a)。利用OCA粘贴X、Y传感器薄膜(b)。
即使细铜线有一根断了,只要剩余的铜线是好的,传感器就能正常工作,所以采用了一个传感器由多条细铜线形成的图案。如果用细铜线网形成 ITO膜常用的棱形图案的话,在棱形间的狭小连接部,连接的铜线数量减少,万一断了,传感器将无法工作。可能会导致成品率降低,因此此次未予采用。
制作的触摸面板的透射率由细铜线的面积占有率决定,可以得出图4所示的透射率与薄膜电阻值的关系。不过,在网状图案中,电阻适合以传感器两端间的电阻表示,不适合用薄膜电阻值讨论。300mm长的传感器两端间的电阻只有约50Ω,非常低。此次的铜网状图案方式与ITO薄膜和银纳米线涂布薄膜等相比,可将电阻值减小一位数以上。
可利用卷对卷工艺 铜网状图案方式的另一个优点是,可解决触摸面板的大型化课题——降低布线电阻。在铜网状图案中,蚀刻铜膜时除了传感器部分外,布线部分也能利用低电阻铜膜形成图案。其线宽/线距可实现10μm/10μm。
图6是利用铜网状图案方式透明导电性薄膜制作触摸面板的工序。这里比较了利用ITO玻璃基板生产玻璃盖板一体型触摸面板的工序,以及利用 ITO、PET薄膜基板和银纳米线膜、PET薄膜基板等生产分立型触摸面板的工序。利用玻璃基板的工序需要三道光刻工序和两道成膜工序。利用ITO、 PET薄膜的工序需要一道光刻工序和一道布线印刷工序。
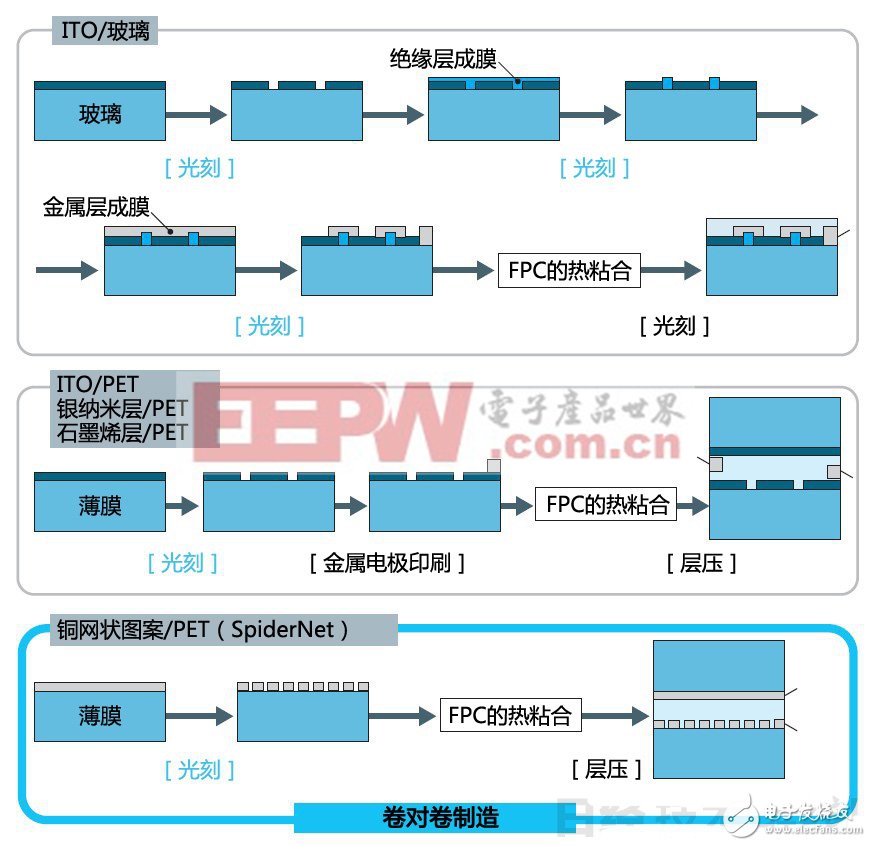
图6:铜网状图案方式与其他方式触摸面板的制造工序比较
铜网状图案方式的电极安装工序少,能以卷对卷工艺制造,因此可降低制造成本。
而铜网状图案方式只需要一道光刻工序即可形成传感器和布线。而且,该工序的优点是可利用卷对卷工艺形成。
能自由弯折和缠绕 利用铜网状图案方式制作的触摸面板的灵敏度取决于X传感器电极和Y传感器电极的电极间隔。该电极间隔在0.3~3mm间变化时的灵敏度如图7所示,即使间隔扩大,灵敏度的降幅也很小。间隔变小的话,可能是因为X、Y传感器电极的交点增加,导致寄生电容增加,灵敏度的增幅也比较小。另外,由于铜线的面积占有率增加,透射率也会降低。

图7:基于细铜线线距的灵敏度变化
即使扩大线距,灵敏度的降幅也较小,缩窄线距时的灵敏度升幅也不太大。
在铜网状图案透明导电性薄膜上粘贴玻璃盖板时,灵敏度会随着玻璃厚度而变化。图8中的实线表示玻璃盖板厚度在0~3mm间变化时的结果。由于业界普遍认为玻璃盖板厚度造成的灵敏度降幅比公开的ITO膜棱形图案触摸面板小,为了调查个中缘由,我们实施了计算机模拟。

图8:玻璃盖板厚度依赖性
本图将增加玻璃盖板厚度时的灵敏度变化进行了系统显示。虚线通过右图进行模型化后,显示了计算结果。
在手指与平板型传感器的构造中,静电容量以C=εS/d来表示,在网状电极与手指的构造中,静电容量以C=2πεL /In(2d/b)来表示。假设S为1cm见方,网状电极的形状为在1cm见方的面积中,在X、Y传感器电极上各排列10条b=8μm宽的细铜线。此时,当电极与手指的间隔d只有不到约0.5mm时,平板型传感器构造的容量值较大,而d扩大到0.5mm以上时,网状构造传感器的容量值较大。我们的铜网状图案SpiderNet薄膜对灵敏度的依赖性与网状电极的模拟结果相似。
铜/PET薄膜原来在FPC(Flexible Printed Circuits)等用途广为人知,可弯折性出色。因此,我们测量了将SpiderNet薄膜缠绕在
- 太阳能电池新改进,铜布线兼顾高效率与低成本(12-17)
- 浅谈如何利用廉价的铜布线实现大尺寸触摸面板(一)(10-08)
- 潜藏在触摸面板组装中的陷井 直接影响iPad成品率(06-02)
- 通过声波传感器检测位置 手臂代替触摸面板(11-24)