CCD图像传感器的原理及应用--μPD3575D
间为φIO的整数倍,倍数由CCD的像元数决定。图4给出了μPD3575D的脉冲时序关系图,该图中为负极性逻辑,与前边图3的正极性逻辑正好相反,在编程过程中,我们可以先实现正极性逻辑,然后通过反向器将极性反过来。
图4
从波形图可以看出,当转移时钟φIO变化(人“1”变到“0”或从“0”变到“1”)后,经过t1时间(最小值200ns,典型值300ns),采样保持时钟φSHO从高电平变低电平,低电平维持时间为t2(最小值100ns,典型值300ns),当φRO翻转,使之由高电平变为低电平,触发的间隔时间为t3(最小值3ns,典型值100ns)。复位脉冲φRO翻转后维持的时间为t4(最小值30ns,典型值100ns),当它由低电平变回高电平时,触发转移时钟φIO翻转,其触发间隔为t5(最小值0ns,典型值50ns)。这样,一个循环结束,输出一个像元。如此不断循环,直至完全输出所有的像元。
那么,如何控制循五泊开始和结束呢?传输门时钟φTG起的就是这一作用,当φTG由低电平变为高电平并经过一定的时延(最小值50ns)后,转移时钟φIO开始按周期翻转,每翻转一次,输出一个像元。所有像元输出完毕,φTG再由高电平变为低电平。图4中φTG只给出了开始部分的波形,后面表示积分时间的波形没有给出,因此后面的积分时间长短可以根据对积分时间的需要自行设定。但积分时间内的φIO数目也是有要求的。因为该CCD芯片的有效单元为1024,加上虚设单元、暗信号和空驱动等共有12613个光电二极管,由于该器件是两列并行分奇偶传输的,所以一个φTG周期至少要有630个φIO脉冲,即φTG>630φIO。
如将其准时钟频率确定为8.000MHz,即周期为125ns,那么,根据给出的最小值就可算出四路波形的周期和占空经,具体列于表3。
表3 四路驱动波形的周期的占空比
根据各路波形的周期、占空经和它们之间存在的关系所给出的典型驱动电路如图5所示。
5 CCD数据采集
CCD可用于位置、尺寸和图像的检测,根据CDD传感器视频信号应用的差异,CCD视频信号的处理有两种方法:一是对CCD视频信号进行二值化处理后,再进行数据采集;二是对CCD视频信号采样、量化编码后再采集到计算机系统。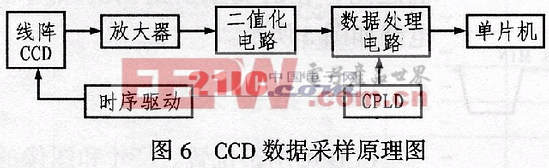
在检测钢轨不平顺的设计中要检测运动光源的瞬时位置,只需要测定光源在CCD上的成像位置,即光源成像在第几个像元上。图6为CCD数据采集原理图,采用二值化方法。
由于线阵CCD既具有高灵敏度的光电转换功能,又具有光电信号的存储和快速读出功能,所以通过一组时序脉冲的驱动控制(驱动器),可以实现对目标光源的实时光电转换与信号读出。当入射在CCD像元上成像时,入射光子被CCD像元吸收并产生相应数量的光生电荷。在光积分期间,光生电荷被积累并存储在彼此隔离的相应像元的势阱中,在每个像元势阱中所积累的信号电荷数与照射在该像元面上的平均照度和光积分时间的乘积成正比。在电荷转移期间,光生电荷依次转移称至输出区,通过复位脉冲的控制,在输出极形成视频信号,每次积分的输出波形代表目标光图像在CCD采样方向的瞬态强度的空间分布,输出视频信号经过低噪声宽带放大器放大处理后,每个光斑的输出波形如图7(a)所示。然后,对CCD的视频信号进行二值化处理,原理如图7(b)所示,二值化的前沿和后沿分别对应CCD像元的信号,计算出这两个像元位置的平均值,即为光线的中心位置,这即是一个检测数据。在CCD连续工作下,所有的检测数据经数据处理后,通过串行通讯电路将结果传送给单片机。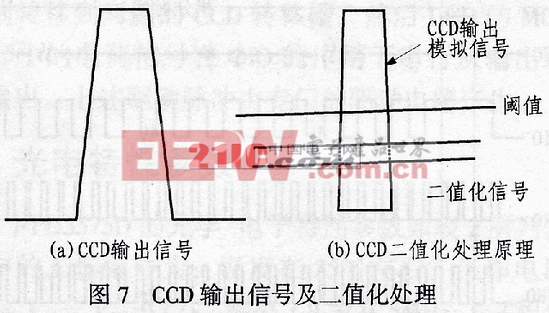
在进行CCD在线检测时,干扰光线较难克服,而且光源使用一段时间,光强也会变弱,这样会引起CCD输出信号幅度变化,从而导致测量误差,因此对上边的电路作了一定改进,即让阈值电压随CCD视频信号的幅值变化,改进后的浮动阈值电路如图8所示。当光源强度变化引起CCD视频信号变化时,可以通过电路CCD视频信号的起伏反馈到阈值上,使阈值电压随之改变,从而保证在光较弱时,二值化电路仍能输出合适的二值化信号。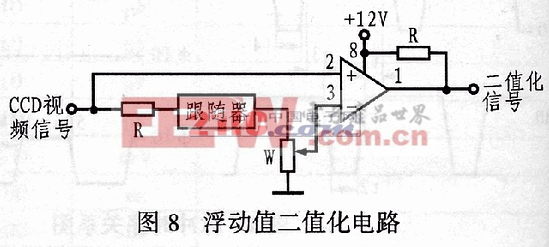
二值化处理后输出的信号称为二值化信号。二值化信号为一个方波,该波形的前沿和后沿分别对应CCD像元的序号,计 算出两个像元位置的平均值,即为线光源在CCD上成像的中心位置,从而获得一个检测数据。在CCD连续工作下,所有的检测数据经处理后,再经过串行通讯电路将结果传给单片机做进一步的处理。
- CCD图像传感器发展及市场(11-24)
- 新型永磁同步电机控制芯片IRMCK203及其应用(01-16)
- AD698型LVDT信号调理电路的原理与应用(01-17)
- 带全速USB接口的PICl8F4550应用设计(04-12)
- 毫欧姆电阻在汽车电子系统中的应用(05-11)
- 利用双电机控制技术简化高能效电器设计(07-20)