一种基于MLX90316的磁性角度传感器的设计方案
应在传感器的输出信号上。通常由芯片本身所产生的误差在0.3度以内。
传感器输出的表征当前角度值的信号可以以串行数字通信(SPI)方式输出,也可再通过D/A转换器变回模拟信号,以PWM模式或模拟量形式输出。为了满足设计电路的结构简单、成本低等要求,这里选择的是SPI输出模式,避免了模拟输入带来的额外误差源。
5.系统软件设计
由于MLX90316所获得的角度信息是以SPI模式输出的,因此程序设计的关键就是SPI通信的实现。SP总线接口是一种同步串行外设接口它是是一种由4根信号线构成的串行接口协议。这4根信号线分别是:时钟线(SCK)、数据输入线(MISO)、数据输出线(MOSI)和从设备使能线(SS)。SPI接口中,MC9S08DZ60作为主控端,MLX90316作为从属端。SPI通信模块主要让MC9S08DZ606读MLX90316输出的数字信号。
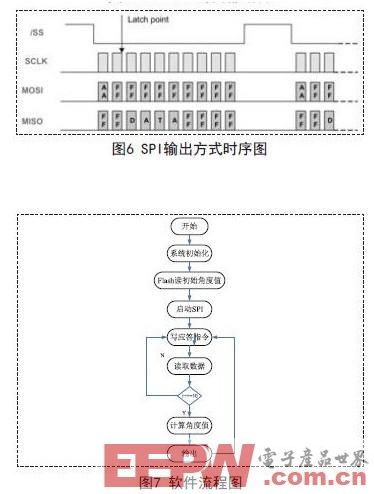
SPI的通信过程为:主控端先输出一个0xAA以及一个0xFF作为通信起始信号,接着输出8个0xFF,而从端会同时输出2个0xFF、4个字节的角度信号以及4个0xFF,从而完成一次数据通信。具体的通信时序如图6所示,软件流程如图(7)所示。
6.实验验证
基于以上理论分析和实际测量,实测数据如表1所示,角度θ的误差在0.5度以内,满足所要求的技术指标。

7.结论
本文在为实现恶劣环境下角度值的测量的基础上,介绍了一款基于MLX90316的非接触式、低成本、高分辨率,高抗干扰的磁性角度传感器的设计方案。方案利用霍尔传感器MLX90316所设计的磁性角度传感器具有非接触式、高精度、高抗干扰等优点。通过对机械结构和硬件电路的分析,找出误差来源,在此基础上编写软件算法,实现角度值的测量,精度能达到0.5°,满足所要求的技术指标,可广泛运用于汽车、电机等工业领域中。
- 如何选择倾角传感器(07-18)
- 多维科技推出MMA253F/MMA153F磁敏角度传感器(11-21)
- 图尔克在RI电感式角度传感器上添加新功能(09-10)
- 12位串行A/D转换器MAX187的应用(10-06)
- AGC中频放大器设计(下)(10-07)
- 低功耗、3V工作电压、精度0.05% 的A/D变换器(10-09)