地面动态跟踪精度试验中的坐标系变换研究
时间:10-16
来源:互联网
点击:
1,0,100.03),求得方位角近似为0 rad,俯仰角为0.149 rad。
当目标沿着正南方向运动时,产生一组位置信息,经过Matlab计算,对应的坐标和方位、俯仰角如表1所示。
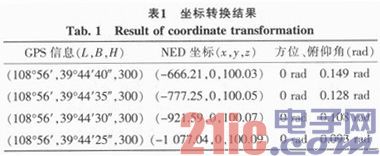
经过Matlab仿真计算的结果符合实际情况,可以用于地面运动目标动态跟踪精度试验中跟踪精度的计算。
4 结论
本文通过对不同参考坐标系之间转换关系的研究,得到了将目标的GPS位置信息转换为目标基于产品坐标系下的方位、俯仰角的解算方法,从而可以与产品输出的角度进行对比,得到光电产品对地面运动目标的动态跟踪精度。使用这种方法可以在地面模拟机载环境,进行地面运动目标跟踪精度的试验,简便有效。
- 基于热电偶试验数据拟合的温度检测仪设计(08-01)
- 大功率直流电机测试电源设计(09-06)
- 浪涌抗扰度试验标准解析及其试验问题解决方案(12-26)
- 扬声器可靠性试验介绍(05-14)
- 小卫星平台某电子设备电磁兼容性设计(10-16)
- 评定封装可靠性水平的MSL试验(11-30)