无人车的巡航控制系统的设计与仿真
限制。具体的巡航控制逻辑简述如下,在巡航控制过程中,首先利用车载传感器车辆车体和前方车辆的相对距离,如果该相对距离大于预定的最小安全距离,则立即刹车。如果相对距离介于最小预定值和最大预定值之间,车体的指令速度按照巡航逻辑计算得出。如果该相对距离大于最大的预定值,则车体可以自身的最大速度行驶。在巡航速度逻辑里,如果车体的速度低于前方车辆的速度,则可以较高的速度行驶,若车体的速度高于前方车辆的速度,则需以前方车辆的速度行驶。
具体的巡航逻辑函数如下。
其中,VL是前方车辆的速度,Vmax是无人车的最大速度,V是无人车的即时速度,hst为最小的安全距离,hgo为最大的安全距离。
为了简化仿真模型,除了采用方程(1)~(3)外,先采用一个更为简单的模型,这个模型为点质量模型完全忽略了车体的惯性矩,如方程(5)所示。

其中,θ是路面的倾角,u是油门量,αn是传动系统的系数,T(v)是扭矩,Cr是滚动磨擦系数,ρ是空气的密度,Cd是气动阻力系数,A是车体的迎风面积。由于发动机的输出扭矩和发动机的转速之间是非线性关系,而发动机的转速和车速是线性惯性,不考虑瞬态响应过程,拟合出来的扭矩和车速之间的关系为

由于式(6)中的a2
为了更准确地仿真巡航控制的效果,假设车体的速度恒定,车辆沿直线轨迹行驶,则控制量只有油门量一个物理量。
基于式(3)的简化模型为
针对式(7)所描述的线性系统,即可应用线性反馈控制方法实现镇定和跟踪。具体的控制律的形式为
u=-Kx (8)
虽然从理论上说,控制律的设计不存在问题。但从现实的角度看,基于方程(6)和(7)的闭环系统的性能显而易见地和车辆的速度、轮胎的参数、车体的参数有关,同时和道路的坡度有关。因此,即使假设的极点配置位置是固定的,由于道路参数的变化、车体的速度的变化、轮胎参数的变化,也会导致反馈系数的改变。
至于传感器的延迟、作动器的延迟带来的影响的理论分析在此略去,在仿真部分,只给出时间延迟的影响结果。
3 仿真与分析
本文仿真时,选取的汽车的参数如下。
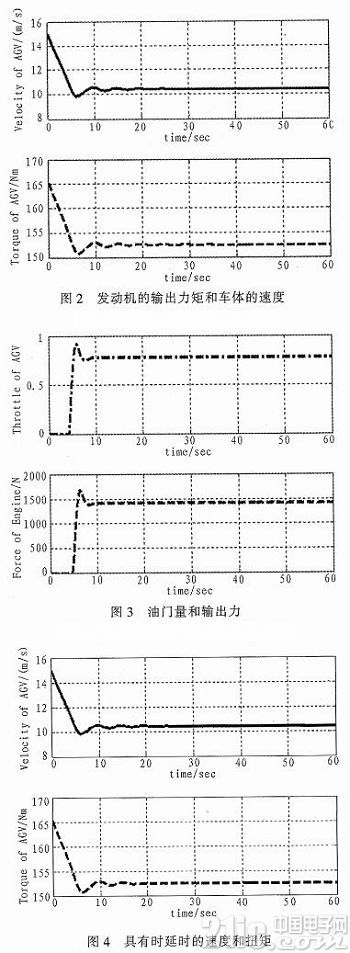
选取的最大安全距离为35 m,最小安全距离为5 m,最大的跟踪速度为35 m/s。如果不考虑传感器的时延、作动器的时延,选择如方程(5)所示的简化模型,选择如方程(4)所示的巡航逻辑函数,则仿真结果如图2~4所示。
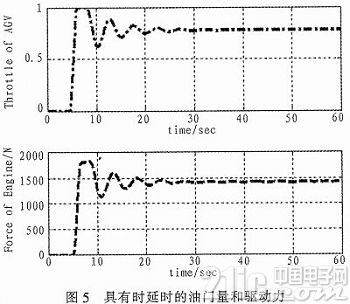
由仿真结果可知,巡航控制系统的效果是理想的。如果考虑了传感器的时延、作动器的时延,可以预计得到,此时的系统响应会出现滞后,性能会下降。具体的仿真结果见图4~5。在图4和图5中,时间延迟设定为0.5s,滞后的效果已经比较明显。如果时间延迟较大,而且每个子系统的时延还不一致的话,可以肯定地说,仿真的效果会更加恶化。

需要说明的是,1)上_述仿真结果是在车体的爬坡角度小于5度、车体的行驶速度不大于35 m/s的条件范围内给出的其中的一组.控制律的设计是基于线性化后的系统模型得出的。2)从仿真结果看,坡度的出现对线性反馈控制律的设计是有影响的,但这个影响通过控制律适当的修正是可以改进的,这和文献中提到的结论是一致的。
时延对系统的性能的影响、对控制系统设计的影响是一个由来已久却没有很好地解决的问题,时延不仅降低了系统的整体性能,有时甚至导致闭环系统失稳。
4 结论
文中针对无人车辆的巡航控制问题进行了研究,提出了简化的数学模型,考虑了相对安全距离、车速、时间延迟等因素的影响。基于线性化的车辆运动模型,给出了控制律的设计及其数学仿真验证,同时考虑了时间延迟的影响。仿真结果表明,基于线性化的模型和线性反馈控制律可以实现车辆的巡航控制,只是需要满足道路的坡度、时间延迟满足一定的要求。后续的研究宜将重点集中在非线性模型和非线性控制律的设计与仿真、时间延迟对闭环系统性能影响的理论分析方面。
- 基于单片机实现摄像机运动控制系统的设计(05-30)
- 一种智能型全自动快速充电机的设计(07-20)
- 基于USB接口的数据采集与控制系统设计(09-21)
- 单级倒立摆控制系统的稳定性算法设计(03-02)
- 利用GaAs PHEMT设计MMIC LNA(11-15)
- 力控组态软件在光伏发电系统中的应用(02-24)