脑部MR图像的Sigma-IFCM分割算法
时间:01-14
来源:互联网
点击:
图像分割是把图像分割成互不相交的区域,使每个区域内的像素具有某种相似的特征,以便对图像进行后续处理。图像分割是图像分析的难点之一,至今没有一个通用且有效的图像分割方法能够满足不同的需求。在脑部MR图像分析中该问题尤为突出。
在诸多的图像分割算法中,模糊C均值(FCM)分割算法是目前应用最广泛的分割算法之一。最早由Dunn提出,后经Bezdek改进。由于模糊集理论对图像的不确定性有较好的描述能力,因此FCM算法在医学图像分割中取得了良好的分割效果。最早把FCM算法用于医学脑部图像分割的是LiC L等人。由于医学图像常有各种未知噪声,因此给分割带来很大的困难。已有一种改进的FCM(IFCM)算法用来解决该问题,并取得了很好的效果 。在此基础上,本文提出一种新的FCM改进算法,即Sigma-IFCM(Sigma Improved Fuzzy C-Means)算法。这种新算法用Sigma过滤器理论考虑邻居像素,并使用去毛刺和边部光滑技术来修正分割后的脑部图像。从实验结果看,分割效果比 IFCM算法有较大的改善。
1 传统的FCM算法
传统的FCM算法对下列目标函数进行优化:
其中,X={x1,x2,x3,……xn}为数据集;U={uik}为模糊隶属度矩阵,uik表示第k个数据属于第i类的隶属度;V={vi}为聚类中心集合;||xk-vi||表示xk与vi的距离,度量数据点和聚类中心的相似度;m为模糊加权指数且1≤m<∞,本文中取m=2;C为聚类的数目且 2≤C<n。
聚类中心计算公式是:
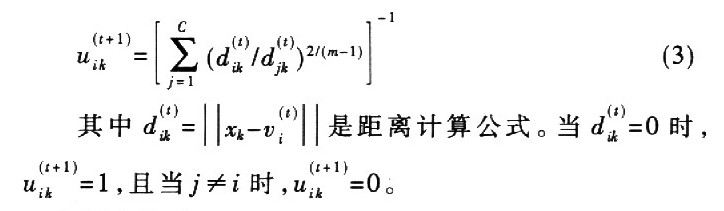
隶属度迭代公式是:
2 IFCM算法
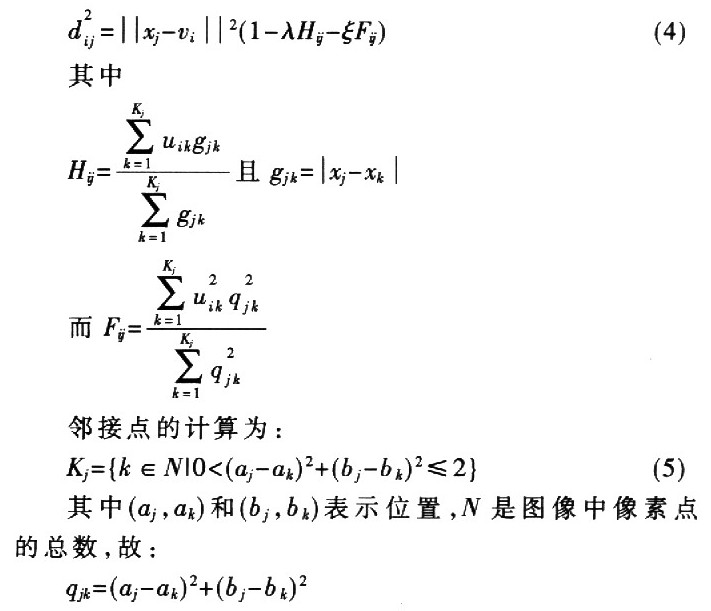
为去除噪声对分割的影响,文献修改了FCM算法的目标函数,但增加了计算复杂度。而文献在每次迭代过程中不仅考虑像素点本身的灰度值,还考虑它周边像素点的灰度值,但只修改了d(t)的计算方法,对目标函数的其他部分未作修改。以下为文献的计算公式,皆省略了上标(t):
其他计算过程及一些迭代公式与原始FCM算法相同。
3 Sigma-IFCM算法
3.1 Sigma过滤器
在IFCM算法中,考虑邻居点对中心点的影响时,需考虑周边所有的8个邻居点。虽然这样可以去除噪声对分割的影响,但同时对各个聚类的边部也造成了影响,即模糊了聚类的边部。所以在计算某像素点的邻居点时,引用Sigma过滤器(即Edge Preserve过滤器)的理论。首先计算所有邻居点的均值和方差,然后只考虑灰度值在均值的一个邻域内的那些邻居点,这样邻居点数目一般少于8个。
均值μ计算公式为:
其中θ是一个非负的区间调整系数。其他的计算和IFCM算法相同。
3.2 图像的平滑
由于脑部图像的复杂性以及分割算法的原因,分割后的图像总是伴随着毛刺、污点、线划边缘凸凹不平等,通过图像的平滑去噪,可以去掉孤立的毛刺、黑斑,平滑边缘,填补面状目标内的小孔等,从而提高图像质量。
一般的平滑处理采用n×n的辅助矩阵(n一般为3~5)作模板,逐行、逐列与图像匹配。当匹配成功时,则把处于模板中心的像素点的分割结果改为与周边像素点的分割结果一样。对于二值图像,根据辅助矩阵中0、1像元的分布,使处于矩阵中心的像素点从“0”变成“1”,或从“1”变为“0”。
3.2.1 去毛刺
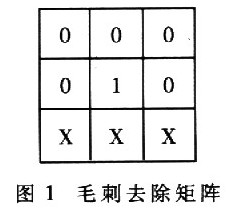
二值图像通常采用图1所示的3×3毛刺去除矩阵,包括其3次90°旋转形成的矩阵。“X”可以为任何值,表示不考虑此处像素点的情况,当矩阵模板在图像上移动时,只要图像与模板匹配,则把模板中心的“1”变为“0”。在算法中,虽然图像不是二值图像,但原理是一样的。即如果模板中心“1”处的像素点分割为一种聚类a,而周边“0”处的像素点分割为另一种聚类b,则把中心像素点变为也属于聚类b,以去除分割后脑部图像边部的毛刺。此时也不考虑“X”处像素点的分割情况。
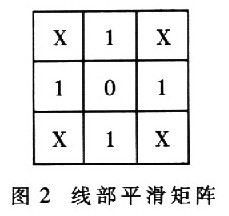
3.2.2 线部平滑与孔洞填补
线部平滑和孔洞填补的方法与去毛刺是一样的,只是模板不同。通常采用图2所示的3×3线部平滑矩阵,包括其3次90°旋转形成的矩阵。同理.当矩阵模板在图像上移动时,只要图像与模板匹配,则更改模板中心的像素点的分割情况。
3.3 计算步骤
Sigma-IFCM算法目标函数与原始的FCM算法相同,如公式(1),计算步骤如下:
(1)确定聚类数目C,模糊加权指数m以及迭代停止阀值ε;
(2)初始化聚类中心,一般随机产生C个聚类中心;
(3)初始化隶属度矩阵U(0);
(4)利用公式(4)计算d,注意邻居的计算公式是(5);
(5)利用公式(2)计算各类聚类中心V(t);
(6)利用公式(3)更新U(t+1);
(7)选择方便的矩阵范数来比较U(t)和U(t+1),如果||U(t+1)-U(t)||≤ε,则停止迭代,否则令t=t+1返回(4);
(8)对分割后的图像进行去毛刺和边线平滑处理。
最后。每个像素点对各个聚类中心都有一个隶属度,把像索点分割到隶属度最大的聚类中心即可。
在诸多的图像分割算法中,模糊C均值(FCM)分割算法是目前应用最广泛的分割算法之一。最早由Dunn提出,后经Bezdek改进。由于模糊集理论对图像的不确定性有较好的描述能力,因此FCM算法在医学图像分割中取得了良好的分割效果。最早把FCM算法用于医学脑部图像分割的是LiC L等人。由于医学图像常有各种未知噪声,因此给分割带来很大的困难。已有一种改进的FCM(IFCM)算法用来解决该问题,并取得了很好的效果 。在此基础上,本文提出一种新的FCM改进算法,即Sigma-IFCM(Sigma Improved Fuzzy C-Means)算法。这种新算法用Sigma过滤器理论考虑邻居像素,并使用去毛刺和边部光滑技术来修正分割后的脑部图像。从实验结果看,分割效果比 IFCM算法有较大的改善。
1 传统的FCM算法
传统的FCM算法对下列目标函数进行优化:

其中,X={x1,x2,x3,……xn}为数据集;U={uik}为模糊隶属度矩阵,uik表示第k个数据属于第i类的隶属度;V={vi}为聚类中心集合;||xk-vi||表示xk与vi的距离,度量数据点和聚类中心的相似度;m为模糊加权指数且1≤m<∞,本文中取m=2;C为聚类的数目且 2≤C<n。
聚类中心计算公式是:

隶属度迭代公式是:
2 IFCM算法
为去除噪声对分割的影响,文献修改了FCM算法的目标函数,但增加了计算复杂度。而文献在每次迭代过程中不仅考虑像素点本身的灰度值,还考虑它周边像素点的灰度值,但只修改了d(t)的计算方法,对目标函数的其他部分未作修改。以下为文献的计算公式,皆省略了上标(t):
其他计算过程及一些迭代公式与原始FCM算法相同。
3 Sigma-IFCM算法
3.1 Sigma过滤器
在IFCM算法中,考虑邻居点对中心点的影响时,需考虑周边所有的8个邻居点。虽然这样可以去除噪声对分割的影响,但同时对各个聚类的边部也造成了影响,即模糊了聚类的边部。所以在计算某像素点的邻居点时,引用Sigma过滤器(即Edge Preserve过滤器)的理论。首先计算所有邻居点的均值和方差,然后只考虑灰度值在均值的一个邻域内的那些邻居点,这样邻居点数目一般少于8个。
均值μ计算公式为:
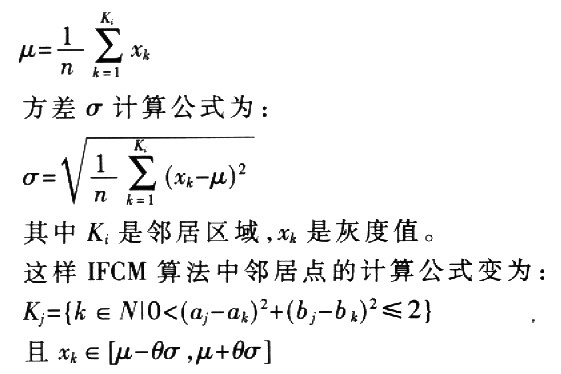
其中θ是一个非负的区间调整系数。其他的计算和IFCM算法相同。
3.2 图像的平滑
由于脑部图像的复杂性以及分割算法的原因,分割后的图像总是伴随着毛刺、污点、线划边缘凸凹不平等,通过图像的平滑去噪,可以去掉孤立的毛刺、黑斑,平滑边缘,填补面状目标内的小孔等,从而提高图像质量。
一般的平滑处理采用n×n的辅助矩阵(n一般为3~5)作模板,逐行、逐列与图像匹配。当匹配成功时,则把处于模板中心的像素点的分割结果改为与周边像素点的分割结果一样。对于二值图像,根据辅助矩阵中0、1像元的分布,使处于矩阵中心的像素点从“0”变成“1”,或从“1”变为“0”。
3.2.1 去毛刺
二值图像通常采用图1所示的3×3毛刺去除矩阵,包括其3次90°旋转形成的矩阵。“X”可以为任何值,表示不考虑此处像素点的情况,当矩阵模板在图像上移动时,只要图像与模板匹配,则把模板中心的“1”变为“0”。在算法中,虽然图像不是二值图像,但原理是一样的。即如果模板中心“1”处的像素点分割为一种聚类a,而周边“0”处的像素点分割为另一种聚类b,则把中心像素点变为也属于聚类b,以去除分割后脑部图像边部的毛刺。此时也不考虑“X”处像素点的分割情况。
3.2.2 线部平滑与孔洞填补
线部平滑和孔洞填补的方法与去毛刺是一样的,只是模板不同。通常采用图2所示的3×3线部平滑矩阵,包括其3次90°旋转形成的矩阵。同理.当矩阵模板在图像上移动时,只要图像与模板匹配,则更改模板中心的像素点的分割情况。
3.3 计算步骤
Sigma-IFCM算法目标函数与原始的FCM算法相同,如公式(1),计算步骤如下:
(1)确定聚类数目C,模糊加权指数m以及迭代停止阀值ε;
(2)初始化聚类中心,一般随机产生C个聚类中心;
(3)初始化隶属度矩阵U(0);
(4)利用公式(4)计算d,注意邻居的计算公式是(5);
(5)利用公式(2)计算各类聚类中心V(t);
(6)利用公式(3)更新U(t+1);
(7)选择方便的矩阵范数来比较U(t)和U(t+1),如果||U(t+1)-U(t)||≤ε,则停止迭代,否则令t=t+1返回(4);
(8)对分割后的图像进行去毛刺和边线平滑处理。
最后。每个像素点对各个聚类中心都有一个隶属度,把像索点分割到隶属度最大的聚类中心即可。
- 基于中颖SH79F164单片机的电子血压计应用(07-01)
- 医疗电子发展方向(04-17)
- 从高交会看医疗器械产品六大发展趋势(11-22)
- 世界首个固态量子处理器问世(07-13)
- 医疗电子技术大会折射行业发展方向(04-18)
- 李现路:DSP6000中C/C++语言和汇编语言的混合编程的方法(11-28)