一种基于双天线的北斗定位系统设计与实现
2.6 TFT液晶屏部分说明
TFT液晶屏的每个像点均是由集成在像素点后面的薄膜晶体管来驱动的,从而可做到高速度、高亮度、高对比度显示屏幕信息,是目前最佳的LCD彩色显示设备之一,其效果接近CRT显示器,是现在笔记本电脑和台式机上的主流显示设备。
系统使用16 bit真彩色,320×240分辨率TFT液晶屏。STM32F103ARM芯片负责TFT液晶屏的驱动,STM32F103ARM芯片与TFT液晶屏之间使用FSMC总线通信,以完成对该液晶屏的初始化和显示控制。
2.7北斗模块部分说明
北斗模块部分使用北京和芯星通公司的UM220北斗定位芯片,其可同时支持BD2 B1、GPS L1两个频点,输出数据方式为USART,数据协议为NMEA 0183,默认通信波特率为9 600 bit.s-1,并可根据用户需要自行设定最高支持波特率为230 400 bit.s-1,其输入/输出信号类型均为LVTTL电平。
UM220通过串口与DSP连接,DSP通过串口完成对北斗模块的配置,并接收其定位信息。
3系统工作流程
3.1系统总体工作流程
系统采用DSP+ARM双核结构,DSP与ARM各司其职。在系统上电后,DSP、ARM芯片完成上电复位,DSP通过USART接收北斗定位模块的定位信息,在不失星的情况下进行北斗双天线定位算法计算。而DSP在进行北斗双天线定位算法计算后,通过串口将计算后的北斗定位信息发送给ARM芯片。若处于失星的情况下,进行UKF算法轨迹预测,并将得到的预测结果通过串口发送给ARM芯片,ARM芯片接收到北斗定位信息后,通过FSMC总线将定位信息更新到TFT液晶屏上,如图5所示。
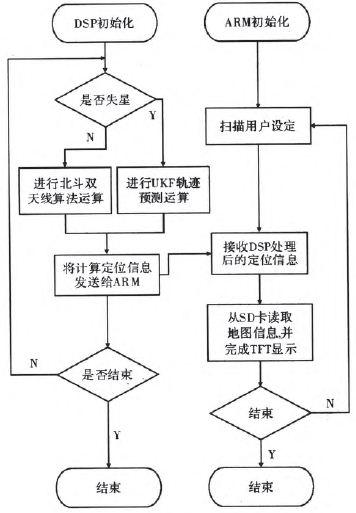
图5系统程序流程图
3.2轨迹预测算法设计
系统采用无迹卡尔曼滤波(UKF)做为失星情况下的轨迹预测算法。无迹卡尔曼滤波(UKF)是一种基于最小方差估计准则的非线性状态估计器,其以非线性最优高斯滤波器作为基本理论框架。UKF采用UT变换技术,即采用确定的样本点(Sigma点)来完成状态变量统计特性沿时间的传播,改进了扩展卡尔曼滤波(EKF)不能求解雅可比矩阵以及泰勒级数线性化只具有一阶的低精度问题,其逼近精度可达二阶或二阶以上。U KF算法实现过程如下
Step1
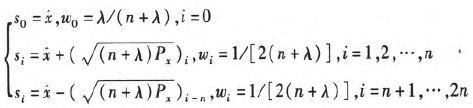
(1)
式中,x为未失星前时刻北斗双天线定位所得定位经、纬度信息;px是x的协方差;n表示系统状态维数;北斗应用中n取值为2;λ是微调参数,其可控制样本点到均值的距离。
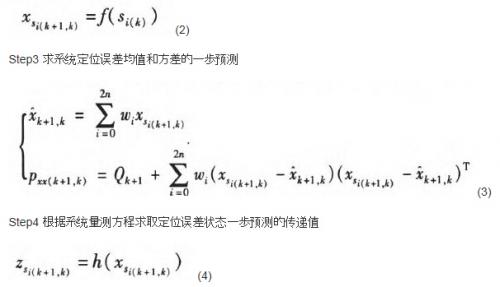
step2根据系统状态方程求样本点传递值
Step5获得定位误差均值和协方差
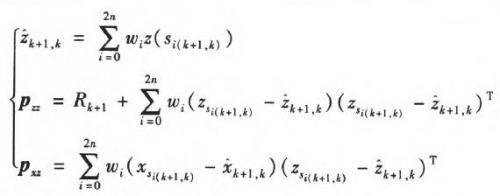 (5)
(5)
式中,pzz是定位误差的量测方差矩阵;pxz是定位误差状态向量与定位误差量测向量的协方差矩阵。
Step6计算UKF增益,更新定位误差状态向量和方差
4系统测试
4.1北斗双天线定位测试
该测试需对北斗双天线定位思想设计进行验证,对系统的定位精度进行实际测试。在晴天的情况下,单北斗模块定位精度约在9 m,双天线北斗模块定位精度约为3.3 m,GPS的定位精度约在10 m,这说明使用双天线结构大幅提升了北斗定位模块的定位精度,如表1所示。
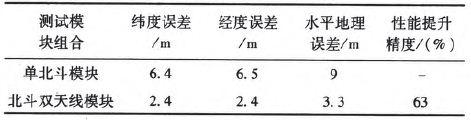
表1北斗双天线测试数据对比
4.2轨迹预测测试
轨迹预测测试选定在晴天情况下,首先沿固定路线运动,然后重新沿固定路线运动,在特定时刻经北斗双天线定位模块的天线取下,然后对比路线轨迹与轨迹预测算法得到的轨迹数据。如图6所示。
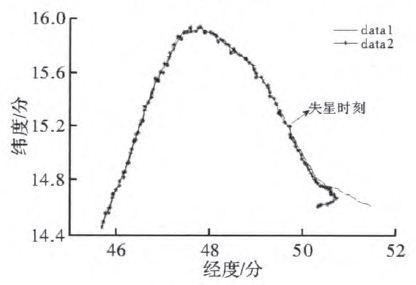
图6轨迹预测算法实际测试
图中横轴坐标为经度坐标,标定到"分",均为东经126°xx分,xx为图中横轴标定坐标值;纵轴坐标为纬度坐标,标定到"分",均为北纬45°xx分,xx为图中纵坐标值。实线轨迹data1为在谷歌地图上标定的真实运动路线,星点状轨迹data2为得到实际运动路线后,精确到重新测定运动轨迹失星时刻前后的运动路线。两次轨迹对比结果表明,在失星情况下采用UKF算法所进行轨迹预测得到临近时刻定位数据的定位精度大约在10 m,介于单模块北斗定位精度和GPS定位精度之间,但随着失星时间的增长,轨迹预测的误差将会增大,在20个采样点后,轨迹预测得到数据的误差将增大至50 m以上。
5结束语
定位精度是本系统的关键,经实际测试在晴天的情况下北斗双天线定位思想设计可大幅度提高北斗定位模块的定位精度。而在其他的定位系统上,若两个定位模块精度相差较小时,也可应用双天线定位思想,提高系统的定位精度。
此外,系统还可使用性能更好的嵌入式处理器,如TI的DM37XX系列芯片,内嵌有"DSP+ARM"双核,既可以做复杂运算,也可进行复杂控制,这样便可减小系统的体积与芯片使用数量,从而简化系统设计,使系统更加便于使用。
- iPhone 4S双天线设计,彻底终结信号门!(09-10)
- 支持4个双天线DUT的非信令2G/3G/LTE综测方案(08-25)