如何提高低静态电流LDO负载瞬变响应性能
时间:11-10
来源:互联网
点击:
低压差稳压器在便携电子系统中应用十分广泛,比如手机、笔记本电脑和PDA等。而移动设备的低功耗和高可靠性要求使得LDO设计任务十分艰巨。
当LDO输出供电的数字电路从一种运行模式切换到另一种运行模式时, LDO的负载需求会快速变化。负载的这种快速变化将使LDO的输出电压产生短暂的尖峰脉冲。大部分的数字电路都会对很大的电压变化产生不良反应。因此,改善LDO的负载瞬变性能十分重要。
传统的LDO结构包括一个误差放大器和一个传递器件,如图1所示。从这种结构可以很容易看出负载变化对LDO运行的影响。
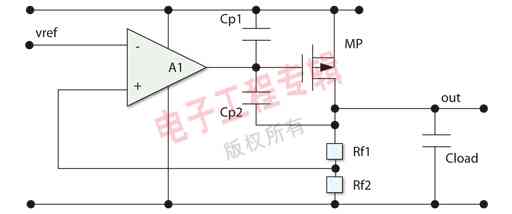
图1:传统LDO的结构简图。
LDO的负载电流变化会改变LDO的输出电压电平,直到误差放大器感知负载电流的变化而驱动通路晶体管来补偿这种变化。然而,在输出电流变化与误差放大器作出反应之间往往有一定的延迟,在这个延迟时间内,LDO输出会出现电压尖峰。通过减少延迟时间可将输出电压的误差减至最小。引起延迟的因素有许多,其中一个主要原因是需要对传递器件的寄生电容进行充电。便携式设备中常用LDO的最大输出电流一般都不会超过几百毫安。这样就需要增加传递器件的面积,从而导致传递器件的寄生电容Cp1和Cp2也增加,甚至超过100pF。
因此,LDO的微小静态电流就成为了关键参数之一,但它会明显限制寄生电容的充电时间。
缩短寄生电容充电时间的最常用办法是将AB类放大器用作误差放大器。一般情况下,AB类放大器的电路都设有比较复杂的两个增益级,而LDO稳压器的功率晶体管则成为了第三个增益级。为了提高这个三级放大器的稳定性,通常可以采用不同的补偿方法,但这些方法都会减少带宽,并增加误差放大器的响应时间。
负载瞬变响应性能得到改善的LDO结构
LDO电路有许多不同的解决方案。本文所描述的电路基本想法是通过误差放大器来改良负载瞬变响应性能和降低静态电流。

图2:带有AB类误差放大器的LDO。
如前文中所述,传递器件具有较大的寄生电容,它会使一个具有微小静态电流的误差放大器在输出级产生一个低频极点。图2所示的结构需要进行一个非常复杂的修正,目的是通过减小误差放大器的带宽来获得更高的稳定性。为了避免采用过于复杂的结构,应采用缓冲器将误差放大器输出级的高输出阻抗与传递器件的高负载电容隔离开来,见图3。
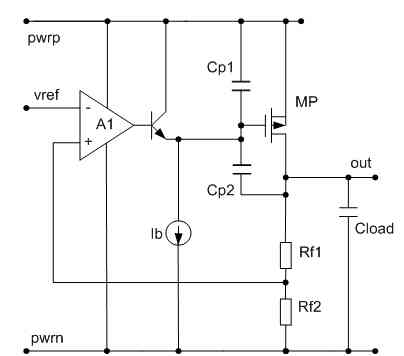
图3:配有射极跟随器(用作缓冲器)的LDO 结构示意图。 但图3所示的这种方法还是不能妥善解决稳定性问题。对于具有微小静态电流的LDO来说,其偏置电流Ib也很小。而射极跟随器的极点与误差放大器A1的极点靠得很近。此外,这种方法将射极跟随器用作了缓冲器,因此可以快速地关闭传递器件MP,但另一方面,电路的导通时间也由于小电流Ib而受到限制。
这种结构的另一个缺点是由于主放大器和缓冲器是串联的,所以延迟时间将由电路中速度较慢的部件来决定。
在结构中,LDO采用了两个放大器,分别是误差放大器A1和电流反馈放大器A2,如图4所示。电流反馈放大器具有第二级反馈环路,可加速LDO的响应。但是该放大器的输入阻抗很小,会降低误差放大器A1的增益下降,从而对LDO的主要参数带来负面影响。
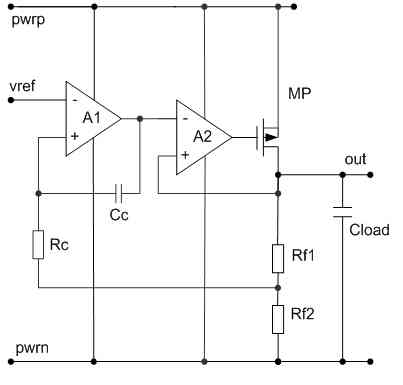
图4:带复合反馈回路的LDO。
电流反馈放大器具有AB类输出级,但此类放大器的负载能力取决于输入电流。然而,低静态电流的LDO一般要求较大的Rf1、Rf2和RC电阻值,这又限制了放大器A2的输入电流。这意味着最大输出电流不会超过几微安,因此无法实现对功率晶体管的寄生电容进行快速充电。
推荐的改进方法和电路结构
前文已经对不同的LDO负载瞬变性能改进方案进行了分析。尽管采用两个运算放大器驱动传递器件似乎是最好的一个方法,但是通过上述分析仍可以发现若干缺点。本节将讨论一种可以消除或减弱这些缺点的结构。
在改进的结构中,具有高增益和低带宽的运算跨导放大器(OTA)被用作主要的误差放大器。而这个放大器决定了LDO的主要性能参数。第二个放大器也是基于OTA,但具有相对较小的增益和较大的带宽,主要用于监测LDO的输出。两个放大器的输出并联在一起,推荐结构如图5所示。
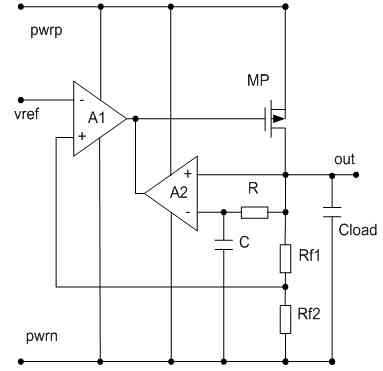
图5:两个误差放大器并联在一起的LDO结构。
主误差放大器A1为一款标准的两级放大器,用于确保LDO的良好性能。由于A1并不是用来快速驱动功率晶体管MP的,因此可以采用A类输出级。反馈电阻Rf1和 Rf2决定了LDO输出电压的大小。
第二个放大器具有高带宽和AB类输出级,可对功率晶体管的寄生电容快速充电。放大器A2的输出连接到放大器A1的输出和功率晶体管MP的栅极。
LDO输出连接到A2的同相输入端和低通滤波器RC,而低通滤波器的输出则连接到放大器A2的输入。这种连接方式在稳态情况下将在A2的输入间产生零电压,从而使LDO的参数不受放大器A2的影响。在LDO的输出负载快速变化时,如果低通滤波器的时间常数大于负载瞬变变化的时间,那么A2的反相输入端将不会发生电压变化。A2的同相输入跟随LDO的输出电压,并开始对变化作出补偿。由于放大器A1的带宽很窄,因此它会明显滞后一段时间才作出反应。经过稍长于低通滤波器时间常数的一段时间后,A2再次进入稳态,且不会对LDO的参数造成影响。图6所示为运算跨导放大器A2的结构。图中只有一个增益级和AB类输出级。带宽由偏置电流Ib确定。
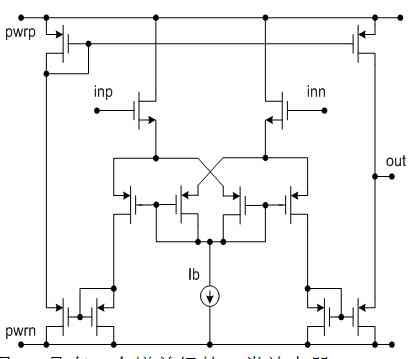
图6:具有一个增益级的AB类放大器。
图7所示为推荐LDO结构的AC分析。图7(a)为推荐LDO结构的简化原理图,图7(b)是从图7(a)转化而来的简化传递函数的等效框图。这样就可以建立推荐LDO运行的幅度响应,如图7(c)所示。在低频情况下,LDO的运行主要由主放大器A1决定。但在较高的频率下,由于出现了负载瞬变,因此LDO的运行便改由快速放大器A2来决定。由于RC滤波器能够隔离并联放大器A1和A2的运行,因此他们不会在同一时间工作。
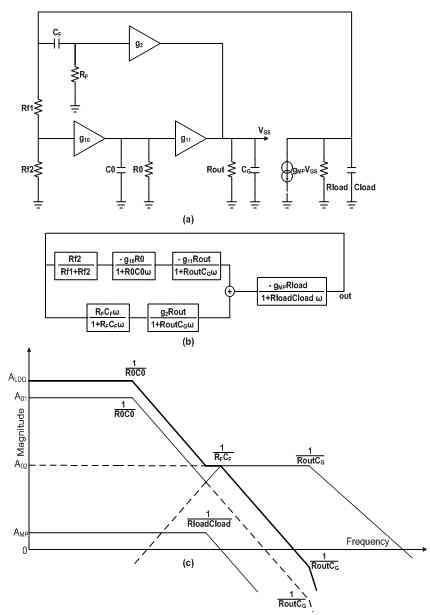
图7:推荐LDO稳压器的AC分析 (a) 简化原理图 (b) 等效框图 (c) 幅度响应。
图8所示为推荐LDO结构的负载瞬变仿真结果。左图为放大器并联时LDO的输出电压,而右图为单一放大器运行时的LDO输出电压。从图中可以看出,放大器并联运行时的输出电压变化幅度比用单一放大器小两倍。

图8:并联放大器运行(左侧)和单放大器运行(右侧)时的仿真负载瞬变曲线。
当LDO输出供电的数字电路从一种运行模式切换到另一种运行模式时, LDO的负载需求会快速变化。负载的这种快速变化将使LDO的输出电压产生短暂的尖峰脉冲。大部分的数字电路都会对很大的电压变化产生不良反应。因此,改善LDO的负载瞬变性能十分重要。
传统的LDO结构包括一个误差放大器和一个传递器件,如图1所示。从这种结构可以很容易看出负载变化对LDO运行的影响。
图1:传统LDO的结构简图。
LDO的负载电流变化会改变LDO的输出电压电平,直到误差放大器感知负载电流的变化而驱动通路晶体管来补偿这种变化。然而,在输出电流变化与误差放大器作出反应之间往往有一定的延迟,在这个延迟时间内,LDO输出会出现电压尖峰。通过减少延迟时间可将输出电压的误差减至最小。引起延迟的因素有许多,其中一个主要原因是需要对传递器件的寄生电容进行充电。便携式设备中常用LDO的最大输出电流一般都不会超过几百毫安。这样就需要增加传递器件的面积,从而导致传递器件的寄生电容Cp1和Cp2也增加,甚至超过100pF。
因此,LDO的微小静态电流就成为了关键参数之一,但它会明显限制寄生电容的充电时间。
缩短寄生电容充电时间的最常用办法是将AB类放大器用作误差放大器。一般情况下,AB类放大器的电路都设有比较复杂的两个增益级,而LDO稳压器的功率晶体管则成为了第三个增益级。为了提高这个三级放大器的稳定性,通常可以采用不同的补偿方法,但这些方法都会减少带宽,并增加误差放大器的响应时间。
负载瞬变响应性能得到改善的LDO结构
LDO电路有许多不同的解决方案。本文所描述的电路基本想法是通过误差放大器来改良负载瞬变响应性能和降低静态电流。
图2:带有AB类误差放大器的LDO。
如前文中所述,传递器件具有较大的寄生电容,它会使一个具有微小静态电流的误差放大器在输出级产生一个低频极点。图2所示的结构需要进行一个非常复杂的修正,目的是通过减小误差放大器的带宽来获得更高的稳定性。为了避免采用过于复杂的结构,应采用缓冲器将误差放大器输出级的高输出阻抗与传递器件的高负载电容隔离开来,见图3。
图3:配有射极跟随器(用作缓冲器)的LDO 结构示意图。 但图3所示的这种方法还是不能妥善解决稳定性问题。对于具有微小静态电流的LDO来说,其偏置电流Ib也很小。而射极跟随器的极点与误差放大器A1的极点靠得很近。此外,这种方法将射极跟随器用作了缓冲器,因此可以快速地关闭传递器件MP,但另一方面,电路的导通时间也由于小电流Ib而受到限制。
这种结构的另一个缺点是由于主放大器和缓冲器是串联的,所以延迟时间将由电路中速度较慢的部件来决定。
在结构中,LDO采用了两个放大器,分别是误差放大器A1和电流反馈放大器A2,如图4所示。电流反馈放大器具有第二级反馈环路,可加速LDO的响应。但是该放大器的输入阻抗很小,会降低误差放大器A1的增益下降,从而对LDO的主要参数带来负面影响。
图4:带复合反馈回路的LDO。
电流反馈放大器具有AB类输出级,但此类放大器的负载能力取决于输入电流。然而,低静态电流的LDO一般要求较大的Rf1、Rf2和RC电阻值,这又限制了放大器A2的输入电流。这意味着最大输出电流不会超过几微安,因此无法实现对功率晶体管的寄生电容进行快速充电。
推荐的改进方法和电路结构
前文已经对不同的LDO负载瞬变性能改进方案进行了分析。尽管采用两个运算放大器驱动传递器件似乎是最好的一个方法,但是通过上述分析仍可以发现若干缺点。本节将讨论一种可以消除或减弱这些缺点的结构。
在改进的结构中,具有高增益和低带宽的运算跨导放大器(OTA)被用作主要的误差放大器。而这个放大器决定了LDO的主要性能参数。第二个放大器也是基于OTA,但具有相对较小的增益和较大的带宽,主要用于监测LDO的输出。两个放大器的输出并联在一起,推荐结构如图5所示。
图5:两个误差放大器并联在一起的LDO结构。
主误差放大器A1为一款标准的两级放大器,用于确保LDO的良好性能。由于A1并不是用来快速驱动功率晶体管MP的,因此可以采用A类输出级。反馈电阻Rf1和 Rf2决定了LDO输出电压的大小。
第二个放大器具有高带宽和AB类输出级,可对功率晶体管的寄生电容快速充电。放大器A2的输出连接到放大器A1的输出和功率晶体管MP的栅极。
LDO输出连接到A2的同相输入端和低通滤波器RC,而低通滤波器的输出则连接到放大器A2的输入。这种连接方式在稳态情况下将在A2的输入间产生零电压,从而使LDO的参数不受放大器A2的影响。在LDO的输出负载快速变化时,如果低通滤波器的时间常数大于负载瞬变变化的时间,那么A2的反相输入端将不会发生电压变化。A2的同相输入跟随LDO的输出电压,并开始对变化作出补偿。由于放大器A1的带宽很窄,因此它会明显滞后一段时间才作出反应。经过稍长于低通滤波器时间常数的一段时间后,A2再次进入稳态,且不会对LDO的参数造成影响。图6所示为运算跨导放大器A2的结构。图中只有一个增益级和AB类输出级。带宽由偏置电流Ib确定。
图6:具有一个增益级的AB类放大器。
图7所示为推荐LDO结构的AC分析。图7(a)为推荐LDO结构的简化原理图,图7(b)是从图7(a)转化而来的简化传递函数的等效框图。这样就可以建立推荐LDO运行的幅度响应,如图7(c)所示。在低频情况下,LDO的运行主要由主放大器A1决定。但在较高的频率下,由于出现了负载瞬变,因此LDO的运行便改由快速放大器A2来决定。由于RC滤波器能够隔离并联放大器A1和A2的运行,因此他们不会在同一时间工作。
图7:推荐LDO稳压器的AC分析 (a) 简化原理图 (b) 等效框图 (c) 幅度响应。
图8所示为推荐LDO结构的负载瞬变仿真结果。左图为放大器并联时LDO的输出电压,而右图为单一放大器运行时的LDO输出电压。从图中可以看出,放大器并联运行时的输出电压变化幅度比用单一放大器小两倍。
图8:并联放大器运行(左侧)和单放大器运行(右侧)时的仿真负载瞬变曲线。
电子 LDO 电路 电压 放大器 电流 电容 电阻 运算放大器 滤波器 低通滤波器 仿真 CMOS 相关文章:
- 超低静态电流电源管理IC延长便携应用工作时间(04-14)
- 负载点降压稳压器及其稳定性检查方法(07-19)
- 高效地驱动LED(04-23)
- 适合高效能模拟应用的线性电压稳压器(07-19)
- 低功耗嵌入式实现的方方面面(04-30)
- 电源设计小贴士5:降压-升压电源设计中降压控制器的使用(03-18)