一种新型开关电源模块均流技术的研究
时间:09-21
来源:互联网
点击:
众所周知,并联技术已成为实现大功率分布式电源系统的核心技术,但由于各并联电源模块特性并不完全一致,输出电压高的模块可能承担更多负载,而有的模块则可能轻载、甚至空载运行,结果导致分担电流多的模块热应力大,降低了电源整体的工作可靠性。随着电子系统的发展,对电源可靠性、效率和功率密度的要求越来越高,因此有必要采取一种有效的均流控制方案,保证整个电源系统的输出电流按各个单元模块的输出能力均摊,这样既能充分发挥单元电源模块的输出能力,又能保证每个单元电源的工作可靠性。
目前已有大量文献介绍并联电源系统的均流技术,虽然其原理不尽相同,但控制器的设计都是在电源模块简化、近似的数学模型基础上进行。考虑到大功率器件及其电源模块的非线性特性,基于古典反馈控制的均流措施不可能取得满意的控制效果。随着计算机技术的迅速发展,复杂参量和系统的状态实时计算、估计已成为现实,自适应控制、滑模变结构控制等现代控制理论以及模糊控制、神经网络等智能控制方法都已应用于电力电子系统。因此,在设计高精度、高稳定性电源时使用先进的控制策略论将更具吸引力和实用价值。本文将模糊控制与常规PID控制相结合,并采用积分前馈控制,构成智能均流控制器,试验波形表明电源系统的动、静态性能得到了显著提高。
并联DC/DC模块的主-从均流法
工作原理
如图1a所示,在主从控制方式下的N个模块中#1模块作为主模块(master),工作在电压源(VS)方式(图1b),其余N-1个模块作为从模块(slave),工作在电流源(CS)方式(图1c)。Vr1是主模块的电流基准值,作为PWM控制器的控制电压;从模块的PWM控制器由主模块与从模块输出电流的偏差电压即电流负反馈来调节,CSC是均流控制器。由于从模块电流均按主模块电流进行调节,其输出电流与主模块电流基本一致,从而实现均流。因此,该系统实际上是一个由电压外环和电流内环构成的双闭环控制系统。

图1 并联电源模块的主-从均流法工作原理图
主要特点
双闭环主-从均流控制技术主要有以下特点:
(1)每个电源模块的输出电流能够自动按功率份额均摊,实现均流;
(2)当输入电压或/和负载电流变化时,能保持输出电压稳定,并且均流瞬态响应好;
(3)由于主从模块间需要通讯联系,所以整个系统较为复杂。
PID均流控制器(CSC)设计
虽然文献提出的PI均流控制器在DC/DC模块电源并联系统中获得了较高的均流精度,但动态性能尚无法 满足电源在负载变化或电网波动过程中的快速性要求。为改善动态特性,在PI调节器的基础上引入微分环节,构成PID控制器。这里以降压型(BUCK)DC/DC电源模块为例,进行具体说明。模块参数:输入电压15V,输出电压5V,输出电流15A。系统采用三模块并联的MSC拓扑,电源总输出电流是45A。若均流控制器(CSC)采用图2所示的PI控制器,选择其带宽BW=28kHz,相位裕量pM=48°,幅值裕量GM=15dB,则其传递函数及参数:
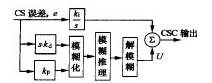
图2 模糊均流控制器结构图
其中:

在PI控制器的基础上引入微分环节,增加低频段零点,从而在保证充分相位裕量的前提下,增加系统带宽。为提高系统快速性,将PID调节器的带宽由28kHz提高到100kHz,相位裕量不变,幅值裕量为无穷大,则PID控制器的传递函数为:

其中:kp=20,ki=1,kd=0.1,传递函数中包括Z1=0.05s-1、Z2=300×103s-1两个零点和附加微分环节的高频极点p=-ωp,ωp值由式(1)决定。值得注意的是,虽然电源系统的响应速度有了显著提高,但是带宽的增加使系统抑制输入信号高频噪声的能力大大下降。因此带宽的选择应当是在电源系统具体的应用背景下具体分析,尽量在系统快速性和抗扰性之间取得平衡。
FUZZY-PID均流控制器设计
由于并联电源系统的强耦合、非线性特性,其均流控制器的PID参数整定非常困难甚至根本无法整定,很难在工程上找到同时满足稳定性和动态性能要求的解决方案。因此,借助于智能控制不依赖被控对象精确数学模型的特点,本文介绍一种新型智能均流控制器设计方案,在PID调节器中引入模糊控制,在实现并联模块均流的同时,进一步提高系统的动静态性能指标。
均流控制器结构
基于FUZZY-PID控制的CSC结构(图2)采用二维模糊控制器结构,以均流误差e和误差变化e作为输入量,u为输出控制量。此时,模糊控制器的控制量成为电流误差和误差变化的非线性函数,它具有类似PD调节器的控制效果,系统动态特性有所改善,而静态性能并不令人满意,系统无法完全消除稳态误差;再加之模糊控制固有的死区现象,使稳态误差进一步扩大。另外,在模糊变量分级不够多的情况下,常常在平衡点附近有振荡现象。为克服这些问题,系统又引入误差信号的积分分离、前馈控制算法,以消除稳态误差。
目前已有大量文献介绍并联电源系统的均流技术,虽然其原理不尽相同,但控制器的设计都是在电源模块简化、近似的数学模型基础上进行。考虑到大功率器件及其电源模块的非线性特性,基于古典反馈控制的均流措施不可能取得满意的控制效果。随着计算机技术的迅速发展,复杂参量和系统的状态实时计算、估计已成为现实,自适应控制、滑模变结构控制等现代控制理论以及模糊控制、神经网络等智能控制方法都已应用于电力电子系统。因此,在设计高精度、高稳定性电源时使用先进的控制策略论将更具吸引力和实用价值。本文将模糊控制与常规PID控制相结合,并采用积分前馈控制,构成智能均流控制器,试验波形表明电源系统的动、静态性能得到了显著提高。
并联DC/DC模块的主-从均流法
工作原理
如图1a所示,在主从控制方式下的N个模块中#1模块作为主模块(master),工作在电压源(VS)方式(图1b),其余N-1个模块作为从模块(slave),工作在电流源(CS)方式(图1c)。Vr1是主模块的电流基准值,作为PWM控制器的控制电压;从模块的PWM控制器由主模块与从模块输出电流的偏差电压即电流负反馈来调节,CSC是均流控制器。由于从模块电流均按主模块电流进行调节,其输出电流与主模块电流基本一致,从而实现均流。因此,该系统实际上是一个由电压外环和电流内环构成的双闭环控制系统。
图1 并联电源模块的主-从均流法工作原理图
主要特点
双闭环主-从均流控制技术主要有以下特点:
(1)每个电源模块的输出电流能够自动按功率份额均摊,实现均流;
(2)当输入电压或/和负载电流变化时,能保持输出电压稳定,并且均流瞬态响应好;
(3)由于主从模块间需要通讯联系,所以整个系统较为复杂。
PID均流控制器(CSC)设计
虽然文献提出的PI均流控制器在DC/DC模块电源并联系统中获得了较高的均流精度,但动态性能尚无法 满足电源在负载变化或电网波动过程中的快速性要求。为改善动态特性,在PI调节器的基础上引入微分环节,构成PID控制器。这里以降压型(BUCK)DC/DC电源模块为例,进行具体说明。模块参数:输入电压15V,输出电压5V,输出电流15A。系统采用三模块并联的MSC拓扑,电源总输出电流是45A。若均流控制器(CSC)采用图2所示的PI控制器,选择其带宽BW=28kHz,相位裕量pM=48°,幅值裕量GM=15dB,则其传递函数及参数:
图2 模糊均流控制器结构图
其中:
在PI控制器的基础上引入微分环节,增加低频段零点,从而在保证充分相位裕量的前提下,增加系统带宽。为提高系统快速性,将PID调节器的带宽由28kHz提高到100kHz,相位裕量不变,幅值裕量为无穷大,则PID控制器的传递函数为:
其中:kp=20,ki=1,kd=0.1,传递函数中包括Z1=0.05s-1、Z2=300×103s-1两个零点和附加微分环节的高频极点p=-ωp,ωp值由式(1)决定。值得注意的是,虽然电源系统的响应速度有了显著提高,但是带宽的增加使系统抑制输入信号高频噪声的能力大大下降。因此带宽的选择应当是在电源系统具体的应用背景下具体分析,尽量在系统快速性和抗扰性之间取得平衡。
FUZZY-PID均流控制器设计
由于并联电源系统的强耦合、非线性特性,其均流控制器的PID参数整定非常困难甚至根本无法整定,很难在工程上找到同时满足稳定性和动态性能要求的解决方案。因此,借助于智能控制不依赖被控对象精确数学模型的特点,本文介绍一种新型智能均流控制器设计方案,在PID调节器中引入模糊控制,在实现并联模块均流的同时,进一步提高系统的动静态性能指标。
均流控制器结构
基于FUZZY-PID控制的CSC结构(图2)采用二维模糊控制器结构,以均流误差e和误差变化e作为输入量,u为输出控制量。此时,模糊控制器的控制量成为电流误差和误差变化的非线性函数,它具有类似PD调节器的控制效果,系统动态特性有所改善,而静态性能并不令人满意,系统无法完全消除稳态误差;再加之模糊控制固有的死区现象,使稳态误差进一步扩大。另外,在模糊变量分级不够多的情况下,常常在平衡点附近有振荡现象。为克服这些问题,系统又引入误差信号的积分分离、前馈控制算法,以消除稳态误差。
电源模块 电压 电流 电子 神经网络 电力电子 PWM 仿真 电路 二极管 IGBT 传感器 电阻 编码器 DSP 电动机 比较器 相关文章:
- 电源SOC:或许好用的“疯狂”创意(07-24)
- 超宽输入范围工业控制电源的设计(10-15)
- 即将普及的碳化硅器件(10-19)
- 多重转换:冗余电源系统电流限制的一种新方法(12-24)
- 基于CAN通信的电源监控系统的设计(04-06)
- 基于CAN总线的低压智能断路器的设计(04-06)