利用低端栅极驱动器IC进行系统开发
时间:12-21
来源:互联网
点击:
低端栅极驱动器IC是专用放大器,普遍用于电源设计中,根据来自PWM控制器的输入信号开关接地参考MOSFET和 IGBT。对于低于100~200W的低功率转换器,这些驱动器可以成功地集成到PWM控制器中以减少元件数,只要满足一定条件便没有问题。这些条件包括:MOSFET开关速度足够快,让开关损耗在可接受的范围内;较高驱动电流脉冲产生的噪声不会干扰控制功能;以及PWM IC的板上散热易于管理。另一方面,在较高功率的转换器中,一般采用单独的驱动器IC以提供更大的驱动功率或更方便地管理噪声和散热。此外,通过对控制器采用更低的电源电压,以及采用较高电压来驱动功率开关,可以提高电源效率,而栅极驱动器IC能够很好地完成这种电平转换工作。
为节约成本,有时也采用分立式元件来搭建简单的栅极驱动电路,在不需要具有先进功能及性能的驱动器IC时,这样做是可行的。不过,这种方案有不少局限性。例如,如果选定NPN/PNP射极跟随器的输出级,偏置电路的设计就必须谨慎,当晶体管的输出饱和电压高至快速开关电压时,会致使输出电压的摆幅减小。如果在输出端改用PMOS/NMOS反向器,控制逻辑必须适应这种逻辑转换,而且当驱动器改变状态时一般有部分击穿。利用上述两种技术的任一种,这种低增益级都需要输入快速边缘来产生快速的切换,需要更多的电路来执行电压级转换等功能,而元件数的增加对空间、装配时间及可靠性都有不良影响。
栅极驱动器IC 能够解决上述大部分问题。它们集成有使能和欠压锁定(UVLO)等功能,可以轻松地在启动、关断和发生故障等最棘手的工作条件下控制功率开关。很小的逻辑门就能够很容易地驱动高阻抗输入,而且由于驱动器IC包含有带正反馈的高增益电路,故只要输入电压超过阈值,输出总是能够快速切换。当IC需要设计以防止阈值电压随过热波动时,很容易通过在输入端添加简单的RC电路来插入一个固定延时。
驱动器大小的决定
使用低端驱动器的两类常见开关是具有硬开关拓扑的初级端开关特征的钳位感应开关,以及同步整流。决定驱动器大小的标准各不相同,这里做一个检阅。
图1所示为钳位感应开关的理想导通波形,其特征是漏源电流的上升和漏源电压的下降之间没有重叠。这产生最差情况的开关损耗,通常表示为整个转换器开关时间TS上的平均功耗,即使实际功耗只发生在图中的t2和t3上。

(t2+t3)的长度取决于平均栅极驱动电流IG和MOSFET栅极穿越这些时间间隔所必需的电荷量,两者都可以在 MOSFET规格中找到,或者是从总栅极电荷曲线上读取。
关断波形是图1的镜像图形,可以采用类似的方法计算关断开关损耗,并代入式(1),求出该功率开关的总开关损耗。从这些式子可明显看出,在损耗时间间隔内,开关损耗与栅极驱动电流成反比。对于钳位感应开关,开关损耗是决定栅极驱动器大小的主要指标。事实上,当它的输出电压接近工作范围中间值时,最重要的驱动器特性是其输出电流。

若把输出电压范围中间值下的稳态电流作为额定电流,则表1是个使用指南,显示了当驱动器路径上没有外接电阻时,单位大小的驱动器提供或消除一定数量的栅极电荷的速度。这个表是通过式(2)计算得出的,但考虑到实验室测试条件的非理想化,乘以了1.5的经验系数。然而,这个系数仍然过于保守,因为即使没有使用串联栅极电阻时,功率开关的内部栅极阻抗也会减慢开关的速度。当栅极驱动器与同步整流器(SR)一起使用时,大小标准又完全不同,由于体二极管在MOSFET沟道导通之前和之后都导通,故开关损耗可忽略不计。在此情况下,所需驱动器电流取决于时序和防止由于dv/dt而导通。
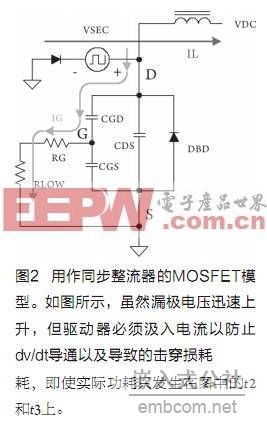
为了防止击穿导致不必要的功耗,必须在加载电压之前完全关断SR,一般通过导通一个或多个初级开关来实现。为了确保此条件得到满足,同时让SR尽可能长地保持导通状态,以最大限度提高效率,必须知道需要多长时间来关断SR。由图2中的MOSFET模型,可计算出关断时间。
这里, CGS=CISS-CRSS是MOSFET的线性栅源电容,CGD_SR是低压非线性栅漏电容或“密勒”电容CGD=CRSS。后者的选择最好对应SR关断期间电压摆幅的中间值,VDD/2。这个值可从CRSS与电压的关系曲线(若提供)读取,也可以根据使用手册给出的对应某些更高电压VDS_SPEC的CRSS_SPEC值按照下式求出:
一旦SR完全被关断,功率转换器中的主要开关可导通,致使SR的漏源电压急速上升。图2显示了这种情况,由CGD和CGS构成的电容性分压器导致内部漏电压增加―MOSFET短暂时反向导通―除非驱动器吸入足够多的电流使内部栅极节点保持在MOSFET的阈值电压之下。这常常是决定SR驱动器大小的主要标准。在漏电压刚开始上升时,CGD最大,所需吸入电流近似为:
如果一个较大的驱动器不能使用,而且它已经紧靠SR放置,避免因dv/dt导通的最终手段是通过减慢主要开关的导通速度来减小dv/dt,但这同时也增加了主要开关的开关损耗。
为节约成本,有时也采用分立式元件来搭建简单的栅极驱动电路,在不需要具有先进功能及性能的驱动器IC时,这样做是可行的。不过,这种方案有不少局限性。例如,如果选定NPN/PNP射极跟随器的输出级,偏置电路的设计就必须谨慎,当晶体管的输出饱和电压高至快速开关电压时,会致使输出电压的摆幅减小。如果在输出端改用PMOS/NMOS反向器,控制逻辑必须适应这种逻辑转换,而且当驱动器改变状态时一般有部分击穿。利用上述两种技术的任一种,这种低增益级都需要输入快速边缘来产生快速的切换,需要更多的电路来执行电压级转换等功能,而元件数的增加对空间、装配时间及可靠性都有不良影响。
栅极驱动器IC 能够解决上述大部分问题。它们集成有使能和欠压锁定(UVLO)等功能,可以轻松地在启动、关断和发生故障等最棘手的工作条件下控制功率开关。很小的逻辑门就能够很容易地驱动高阻抗输入,而且由于驱动器IC包含有带正反馈的高增益电路,故只要输入电压超过阈值,输出总是能够快速切换。当IC需要设计以防止阈值电压随过热波动时,很容易通过在输入端添加简单的RC电路来插入一个固定延时。
驱动器大小的决定
使用低端驱动器的两类常见开关是具有硬开关拓扑的初级端开关特征的钳位感应开关,以及同步整流。决定驱动器大小的标准各不相同,这里做一个检阅。
图1所示为钳位感应开关的理想导通波形,其特征是漏源电流的上升和漏源电压的下降之间没有重叠。这产生最差情况的开关损耗,通常表示为整个转换器开关时间TS上的平均功耗,即使实际功耗只发生在图中的t2和t3上。
(t2+t3)的长度取决于平均栅极驱动电流IG和MOSFET栅极穿越这些时间间隔所必需的电荷量,两者都可以在 MOSFET规格中找到,或者是从总栅极电荷曲线上读取。
关断波形是图1的镜像图形,可以采用类似的方法计算关断开关损耗,并代入式(1),求出该功率开关的总开关损耗。从这些式子可明显看出,在损耗时间间隔内,开关损耗与栅极驱动电流成反比。对于钳位感应开关,开关损耗是决定栅极驱动器大小的主要指标。事实上,当它的输出电压接近工作范围中间值时,最重要的驱动器特性是其输出电流。
若把输出电压范围中间值下的稳态电流作为额定电流,则表1是个使用指南,显示了当驱动器路径上没有外接电阻时,单位大小的驱动器提供或消除一定数量的栅极电荷的速度。这个表是通过式(2)计算得出的,但考虑到实验室测试条件的非理想化,乘以了1.5的经验系数。然而,这个系数仍然过于保守,因为即使没有使用串联栅极电阻时,功率开关的内部栅极阻抗也会减慢开关的速度。当栅极驱动器与同步整流器(SR)一起使用时,大小标准又完全不同,由于体二极管在MOSFET沟道导通之前和之后都导通,故开关损耗可忽略不计。在此情况下,所需驱动器电流取决于时序和防止由于dv/dt而导通。
为了防止击穿导致不必要的功耗,必须在加载电压之前完全关断SR,一般通过导通一个或多个初级开关来实现。为了确保此条件得到满足,同时让SR尽可能长地保持导通状态,以最大限度提高效率,必须知道需要多长时间来关断SR。由图2中的MOSFET模型,可计算出关断时间。
这里, CGS=CISS-CRSS是MOSFET的线性栅源电容,CGD_SR是低压非线性栅漏电容或“密勒”电容CGD=CRSS。后者的选择最好对应SR关断期间电压摆幅的中间值,VDD/2。这个值可从CRSS与电压的关系曲线(若提供)读取,也可以根据使用手册给出的对应某些更高电压VDS_SPEC的CRSS_SPEC值按照下式求出:
一旦SR完全被关断,功率转换器中的主要开关可导通,致使SR的漏源电压急速上升。图2显示了这种情况,由CGD和CGS构成的电容性分压器导致内部漏电压增加―MOSFET短暂时反向导通―除非驱动器吸入足够多的电流使内部栅极节点保持在MOSFET的阈值电压之下。这常常是决定SR驱动器大小的主要标准。在漏电压刚开始上升时,CGD最大,所需吸入电流近似为:
如果一个较大的驱动器不能使用,而且它已经紧靠SR放置,避免因dv/dt导通的最终手段是通过减慢主要开关的导通速度来减小dv/dt,但这同时也增加了主要开关的开关损耗。
放大器 PWM MOSFET IGBT 电流 电压 电路 电阻 二极管 电容 CMOS 电感 电容器 变压器 PCB 飞兆 半导体 相关文章:
- 用于电压或电流调节的新调节器架构(07-19)
- 电源设计小贴士 2:驾驭噪声电源(01-01)
- 适合高效能模拟应用的线性电压稳压器(07-19)
- 低功耗嵌入式实现的方方面面(04-30)
- 用于低成本高效率离线LED驱动器的初级端调节技术(05-14)
- 开关模式LED驱动器的调光技术(10-20)