未来汽车设计中的基于IBS的电池管理
时间:11-05
来源:互联网
点击:
混合动力车
混合动力车有两种主要类型:串联式混合和并联式混合。在串联式混合中,内燃机并不实际推动汽车向前,而是用于给发电机供电和给车载电池充电。在并联式混合中,电动机和内燃机都连接到传动系统。这使两套装置能在高需求到来时立刻同时提供驱动力,或者在低需求时只通过电动机提供驱动力。这种模式允许内燃机将电动机用作发电机,在需要时给电池充电。两种设计都可内含高压电池组,用于储存供给电动机的电力。为了从每种设计中获得最大效率,该电池组需要由精确的电池管理系统进行密切监控。
电动车
电动车基于纯电动驱动系统,汽车上根本就没有内燃机。在纯电动车(FEV)中,轿车或卡车本身的电池是电动机和所有标准电气系统的唯一电力来源。良好的电池管理系统在此类汽车中比其他类型汽车中都更加重要。这是因为如果电池电量用完了,汽车就失去了动力来源。纯电动车中的电池通常由串联或并联的电池单元堆叠组成,用以获得所需的输出电压。这些电池单元堆叠中的每一个都应当包含其自身的电池管理系统,以确保当一个电池单元发生故障时不会连累整个电池系统。
其他传感技术
开环霍尔效应传感器
可靠性是许多其他监控技术在汽车应用中表现不甚理想的原因之一。由于成本、尺寸和测量范围的缘故,开环霍尔效应传感器实际上是唯一具有可比性的电池监控技术。此种传感器利用了霍尔效应,亦即通过在带电导线周围形成的磁场来测量流经该导线的电流。电流互感器无法与直流汽车电气系统一起使用,对于被测量的电流值而言,闭环霍尔效应传感器成本太高,尺寸太大 [1]。开环霍尔效应传感器的最大特点是,由于实际上它并不在电流路径之中,所以在测量电流时没有电能损耗,但这是以牺牲精度和可靠性为代价换来的 [1]。
与分流器感测有关的问题
由于 IBS 在测量电流时要使用其核心元件电阻性分流器,因此存在与其“在电路中”有关的损耗。但通过使用阻值极低的分流器,该损耗对电流范围的很大一部分发是可忽略的。例如,一个100μΩ分流器在100 A电流下只会造成1 W电能损耗。在使用12 V电池提供100 A电流的情况下,这相当于0.083%电能损耗。对于在实际测试中观测到的电流值,分流器损耗在3 A标准工作电流下为900μW,在350 A短时最大起动电流尖峰下为 12.25 W。在实际测试中,35英寸、4-AWG 正极电池电缆的阻值为788μΩ [2]。这意味着仅正极电池电缆中的电能损耗就为IBS中的电能损耗的近八倍之多。使用此类低阻值分流器应当允许IBS单元在± 600 A(连续)和 ± 2,000 A(不超过900 J的脉冲应用)的电流范围内工作。
因为霍尔效应传感器并不直接连接至带电导线,因此外力会造成磁场测量结果具有显著误差 [1]。单是地球磁场就会造成 0.4 A 误差,更不用说提汽车内部的其他线圈、导体和电动机/发电机所产生的磁场了 [1]。“在电路中”意味着与霍尔效应传感器相比,使用 IBS 时由外部干扰造成的误差小很多。在任何车内条件下,IBS 单元的最大电流感测误差应当为 0.5 % + 偏差(30 mA),这与使用霍尔效应传感器时可观测到的由地球磁场引起的误差是相同的(只需改变 80A 电流的流动方向即可测量到这一误差)[1]。
开环霍尔效应传感器存在与其本身有关的自然偏差,甚至在零电流时也是存在的 [1]。该偏差受温度影响很大,即使是优良的传感器也有可达0.5%的标准偏移。要解释该偏差改变的原因需要一个额外温度传感器 [1]。霍尔效应传感器的最后缺点是,由于输出如此严重依赖于传感器的位置,所以可能需要进行电路内校准。IBS的电流测量全都以0 A为中心,除了噪声以外,无需考虑自然偏差的问题。电阻性分流器的电阻温度系数(TCR)在IBS的宽工作温度范围内会造成读数误差。通过处理技术和使用现有的车载传感器,可计算出该系数并且只会对测量结果具有最小影响,绝不会超出额定精度。这些计算和其他计算全都预装于IBS单元,所以它真的是一种即插即用器件,无需二次或系统内校准。
实际观测结果
我们使用IBS进行了实际城市驾驶测试,测试中IBS连接到负极电池接线柱(和在任何汽车应用中一样),以便对电池进行监控。我们以相同方式进行了两次独立的驾驶测试。所选驾驶路线围绕着内布拉加斯州哥伦布市区。选择该路线的原因是为了获得对标准早晨通勤情况的近似,不会中断交通流,也不会使测试被其他驾驶员打断。第一个测试是模拟起停测试,具体情况是,汽车在到达预定地点时完全停止(其间路过12个街区,停车6次)并立即关闭发动机。记录停车时间,在15秒停车间隔时间过后,启动发动机并恢复前进运动。第二个测试尽量模仿第一个测试,但有一个例外:汽车永远不关闭发动机。停车持续时间也是15秒钟。对路线、最大车速和加速度全都进行监控,以尽量严格地模拟第一个测试。对这些测试结果的比较显示,与当今大多数轿车和卡车的标准汽车系统相比,起停系统给电池造成了很大的负担。另外,起停测试结果还显示了作为汽车感测系统的 IBS在真实汽车环境中的有效性。
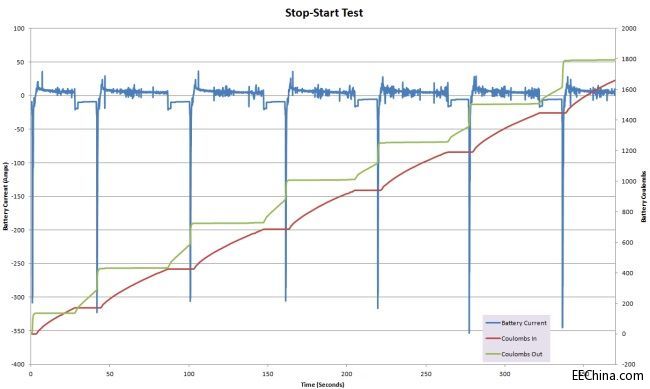
图3. 使用IBS的实际起停测试
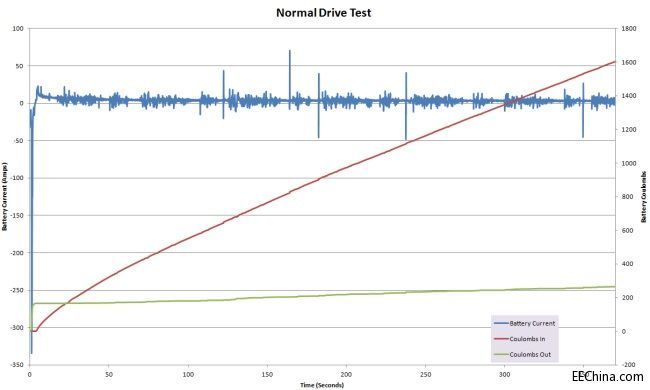
图4. 使用IBS的实际驾驶测试
两次实际驾驶测试的结果如图3和图4所示。这个简单测试证明我们需要可靠和精密的电池监控系统。每次测试只持续6分钟时间,其间有6次15秒钟停车。起停测试中与这6次停车有关的重启比正常驾驶测试中多需要 1,528 库仑电荷。与测试开始时相比,起停测试结束时甚至有 135 库仑的电荷净减少。如图 4 所示,正常驾驶测试有一个初次起动,但在随后的电荷损失之后有一个施加至电池的净电荷,这说明了电池低效的原因。
测试是对在内布拉斯加州哥伦布市早晨开车上班时的情况的短时模拟,交通堵塞在那里并不是多大的问题,测试电池是崭新的。如果这是轿车在交通拥挤时间离开洛杉矶或慕尼黑,则停车次数与驾驶时间相比可能糟得多。如果电池较弱的汽车遇上了长时间走走停停的交通状况,则容易想象,电池电量可能低到在某次停车后无法再重启发动机。如果轿车或卡车配备了 IBS,则发动机控制系统就能准确地监控电池电量,并确定其重启发动机的能力。
IBS 是电池电量消耗迅速问题的完整解决方案。它能够准确地测量所有需要监控的电池参数,以实现准确的电池健康状况预测。这些测量如图 5(取自图 3 中起停测试的末端)所示。该图显示了从 IBS 发送的原始数据,其将被中央控制器接收并用作电池健康信息。
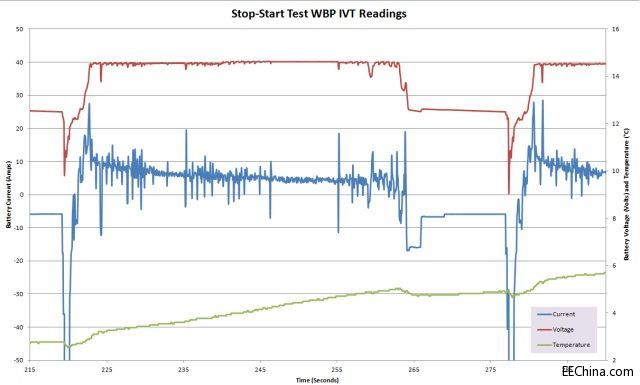
图5. IBS测量的电流、电压和温度值
混合动力车有两种主要类型:串联式混合和并联式混合。在串联式混合中,内燃机并不实际推动汽车向前,而是用于给发电机供电和给车载电池充电。在并联式混合中,电动机和内燃机都连接到传动系统。这使两套装置能在高需求到来时立刻同时提供驱动力,或者在低需求时只通过电动机提供驱动力。这种模式允许内燃机将电动机用作发电机,在需要时给电池充电。两种设计都可内含高压电池组,用于储存供给电动机的电力。为了从每种设计中获得最大效率,该电池组需要由精确的电池管理系统进行密切监控。
电动车
电动车基于纯电动驱动系统,汽车上根本就没有内燃机。在纯电动车(FEV)中,轿车或卡车本身的电池是电动机和所有标准电气系统的唯一电力来源。良好的电池管理系统在此类汽车中比其他类型汽车中都更加重要。这是因为如果电池电量用完了,汽车就失去了动力来源。纯电动车中的电池通常由串联或并联的电池单元堆叠组成,用以获得所需的输出电压。这些电池单元堆叠中的每一个都应当包含其自身的电池管理系统,以确保当一个电池单元发生故障时不会连累整个电池系统。
其他传感技术
开环霍尔效应传感器
可靠性是许多其他监控技术在汽车应用中表现不甚理想的原因之一。由于成本、尺寸和测量范围的缘故,开环霍尔效应传感器实际上是唯一具有可比性的电池监控技术。此种传感器利用了霍尔效应,亦即通过在带电导线周围形成的磁场来测量流经该导线的电流。电流互感器无法与直流汽车电气系统一起使用,对于被测量的电流值而言,闭环霍尔效应传感器成本太高,尺寸太大 [1]。开环霍尔效应传感器的最大特点是,由于实际上它并不在电流路径之中,所以在测量电流时没有电能损耗,但这是以牺牲精度和可靠性为代价换来的 [1]。
与分流器感测有关的问题
由于 IBS 在测量电流时要使用其核心元件电阻性分流器,因此存在与其“在电路中”有关的损耗。但通过使用阻值极低的分流器,该损耗对电流范围的很大一部分发是可忽略的。例如,一个100μΩ分流器在100 A电流下只会造成1 W电能损耗。在使用12 V电池提供100 A电流的情况下,这相当于0.083%电能损耗。对于在实际测试中观测到的电流值,分流器损耗在3 A标准工作电流下为900μW,在350 A短时最大起动电流尖峰下为 12.25 W。在实际测试中,35英寸、4-AWG 正极电池电缆的阻值为788μΩ [2]。这意味着仅正极电池电缆中的电能损耗就为IBS中的电能损耗的近八倍之多。使用此类低阻值分流器应当允许IBS单元在± 600 A(连续)和 ± 2,000 A(不超过900 J的脉冲应用)的电流范围内工作。
因为霍尔效应传感器并不直接连接至带电导线,因此外力会造成磁场测量结果具有显著误差 [1]。单是地球磁场就会造成 0.4 A 误差,更不用说提汽车内部的其他线圈、导体和电动机/发电机所产生的磁场了 [1]。“在电路中”意味着与霍尔效应传感器相比,使用 IBS 时由外部干扰造成的误差小很多。在任何车内条件下,IBS 单元的最大电流感测误差应当为 0.5 % + 偏差(30 mA),这与使用霍尔效应传感器时可观测到的由地球磁场引起的误差是相同的(只需改变 80A 电流的流动方向即可测量到这一误差)[1]。
开环霍尔效应传感器存在与其本身有关的自然偏差,甚至在零电流时也是存在的 [1]。该偏差受温度影响很大,即使是优良的传感器也有可达0.5%的标准偏移。要解释该偏差改变的原因需要一个额外温度传感器 [1]。霍尔效应传感器的最后缺点是,由于输出如此严重依赖于传感器的位置,所以可能需要进行电路内校准。IBS的电流测量全都以0 A为中心,除了噪声以外,无需考虑自然偏差的问题。电阻性分流器的电阻温度系数(TCR)在IBS的宽工作温度范围内会造成读数误差。通过处理技术和使用现有的车载传感器,可计算出该系数并且只会对测量结果具有最小影响,绝不会超出额定精度。这些计算和其他计算全都预装于IBS单元,所以它真的是一种即插即用器件,无需二次或系统内校准。
实际观测结果
我们使用IBS进行了实际城市驾驶测试,测试中IBS连接到负极电池接线柱(和在任何汽车应用中一样),以便对电池进行监控。我们以相同方式进行了两次独立的驾驶测试。所选驾驶路线围绕着内布拉加斯州哥伦布市区。选择该路线的原因是为了获得对标准早晨通勤情况的近似,不会中断交通流,也不会使测试被其他驾驶员打断。第一个测试是模拟起停测试,具体情况是,汽车在到达预定地点时完全停止(其间路过12个街区,停车6次)并立即关闭发动机。记录停车时间,在15秒停车间隔时间过后,启动发动机并恢复前进运动。第二个测试尽量模仿第一个测试,但有一个例外:汽车永远不关闭发动机。停车持续时间也是15秒钟。对路线、最大车速和加速度全都进行监控,以尽量严格地模拟第一个测试。对这些测试结果的比较显示,与当今大多数轿车和卡车的标准汽车系统相比,起停系统给电池造成了很大的负担。另外,起停测试结果还显示了作为汽车感测系统的 IBS在真实汽车环境中的有效性。
图3. 使用IBS的实际起停测试
图4. 使用IBS的实际驾驶测试
两次实际驾驶测试的结果如图3和图4所示。这个简单测试证明我们需要可靠和精密的电池监控系统。每次测试只持续6分钟时间,其间有6次15秒钟停车。起停测试中与这6次停车有关的重启比正常驾驶测试中多需要 1,528 库仑电荷。与测试开始时相比,起停测试结束时甚至有 135 库仑的电荷净减少。如图 4 所示,正常驾驶测试有一个初次起动,但在随后的电荷损失之后有一个施加至电池的净电荷,这说明了电池低效的原因。
测试是对在内布拉斯加州哥伦布市早晨开车上班时的情况的短时模拟,交通堵塞在那里并不是多大的问题,测试电池是崭新的。如果这是轿车在交通拥挤时间离开洛杉矶或慕尼黑,则停车次数与驾驶时间相比可能糟得多。如果电池较弱的汽车遇上了长时间走走停停的交通状况,则容易想象,电池电量可能低到在某次停车后无法再重启发动机。如果轿车或卡车配备了 IBS,则发动机控制系统就能准确地监控电池电量,并确定其重启发动机的能力。
IBS 是电池电量消耗迅速问题的完整解决方案。它能够准确地测量所有需要监控的电池参数,以实现准确的电池健康状况预测。这些测量如图 5(取自图 3 中起停测试的末端)所示。该图显示了从 IBS 发送的原始数据,其将被中央控制器接收并用作电池健康信息。
图5. IBS测量的电流、电压和温度值
传感器 电阻 电流 电压 电子 总线 温度传感器 电动机 霍尔效应 电路 Maxim 相关文章:
- 另类传感器观念:汽车传感器(2)(11-30)
- 满足汽车高温应用环境要求的传感器接口IC(01-10)
- 构建可靠的容性传感器汽车开关和控制接口(01-06)
- 汽车HVAC系统中的传感器(02-23)
- 新技术、新应用让传感器深入汽车电子设备的各个角落(05-11)
- 汽油发动机的传感器全面介绍(05-19)