一种基于变压器的电动汽车电池主动均衡方案设计
时间:06-05
来源:互联网
点击:
2 均衡方法
采用一个反激式变压器作为核心,通过磁场与电场的转换,实现能量在单个电池单元与整个电池组间双向传递。当某节电池电压过高时,可以通过并接在该电池上的绕组将多余的能量转移到整个电池组上去,这个过程我们称之为顶部均衡法。当某节电池电压过低时,通过接在电池组上的绕组可以把电池组的能量转移到该节电池上,这个过程我们称之为底部均衡法。
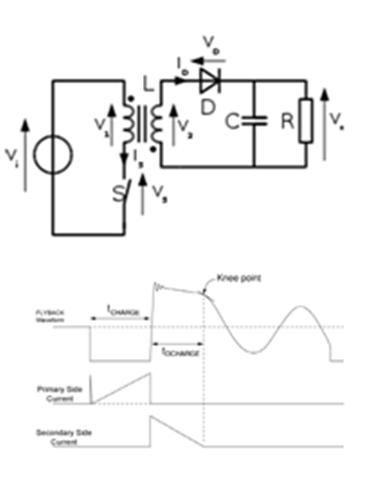
图2:反激式平衡电路原理及典型波形。
2.1 顶部均衡
如果某个电池单元的电压高于其他单元,那么就需要将其中的能量导出,这在充电模式下尤其必要。如果不进行均衡,充电过程在第一块电池单元充满之后就不得不立即停止。均衡可以保持所有电池单元的电压相等而避免发生过早停止充电的情况。图2.1给出了顶部平衡模式下的能量流动情况。在电压扫描之后,发现电池单元5 是整个电池组中电压最高的单元。此时闭合开关sec5,电流从电池流向变压器。在开关sec5 断开后闭合主开关,此时,变压器就从储能模式进入了能量输出模式。能量通过初级线圈送入整个电池组。
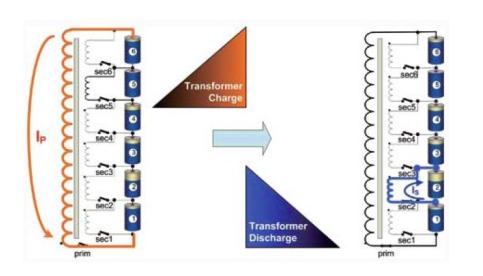
图2.1:顶部均衡原理。
2.2 底部均衡
底部均衡法中的电流和时序条件与顶部均衡法非常类似,只是顺序和电流的方向与顶部均衡法相反。扫描发现电池单元2 是最弱的单元,必须对其进行补充充电。此时闭合主开关“( prim”),电池组开始对变压器充电。主开关断开后,变压器存储的能量就可以转移至选定的电池单元。相应的次级“( sec”)开关在本例中是开关sec2 闭合后,就开始能量转移。尤其是当某个电池单元的电压已经达到SoC 的下限时,底部平衡法能够帮助延长整个电池组的工作时间。只要电池组提供的电流低于平均平衡电流就能持续放电,直到最后一块电池单元也被耗尽。
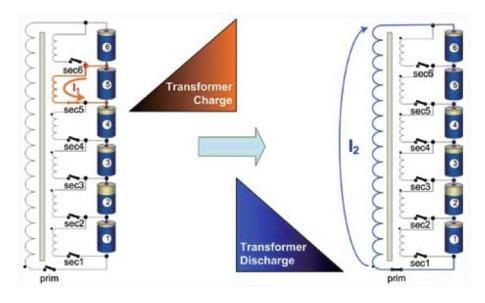
图2.2:顶部均衡原理。
2. 3 电池组间均衡法
如图2.3所示,闭合其中一个电池组的电子开关SP1 和SP2,就可以对最左边的绕组的初级进行充电,之后关闭SP1和SP2,就可以把能量放入总电池组中。这样就可以实现更多电池单体的串联。
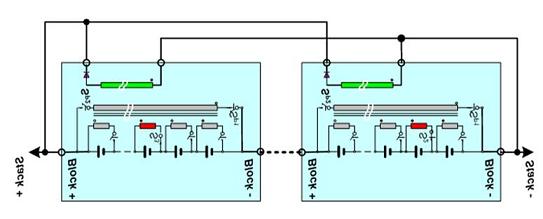
图2.3:组间平衡。
2.4 电压检测
为了对每个电池的荷电状态进行管理,每个电池的电压都要加以测量。由于只有1号电池处于微控制器模数转换范围内,因此不能直接测量电池块中其他电池的电压。一种可能的方案是采用差分放大器阵列,但这需要保持整个电池块的电压水平。
下面提出一种只需添加少量硬件就可以检测所有电池电压的方法。变压器的主要作用是电荷平衡,但同时我们也可将它作为多路复用器使用。在电压检测模式下,变压器的反激模式没有被使用。当S1至SN开关中的某一个闭合时,所接通的电池的电压被传输至变压器的所有绕组。经过一个分立滤波器简单的预处理,检测信号被输入至微控制器ADC输入管脚。S1至SN中的任一开关闭合时所产生的检测脉冲的持续时间非常短暂,实际的导通时间可能只有4μs,因此变压器中存储的能量并不多。当该开关断开后,磁场中存储的能量将通过主晶体管馈回整个电池块,因此电池块的能量不受影响。对全部电池扫描一遍后,一个扫描周期结束,系统回到初始状态。也就读取了电池组中每一节电池的电压信号。
3 设计方案
3.1 硬件部分
电池管理系统采用独立的内部CAN总线进行数据和指令传输,每个内部CAN总线子节点电路和最大12节串联电池单元相连,组成电池包。各个电池包串联组成电动汽车所需的电池总成。主节点采用汽车级16位单片机XC2267连接内部CAN网络,同时接入电动汽车上的公共CAN网络,收发相关的指令和数据。见图3.1.1
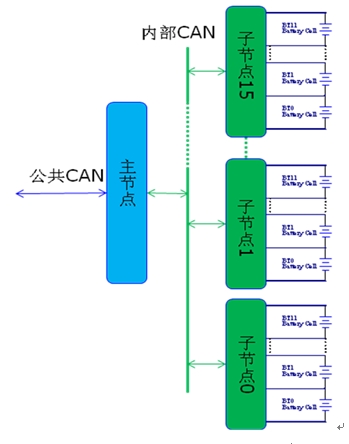
图3.1.1:电池管理系统框图。
每个子节点可对所在电池包的12节电池进行SOC监测并执行电池均衡功能。见图3.1.2
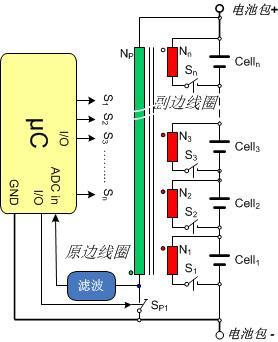
图3.1.2:子节点电路示意图。
子节点变压器采用1个原边线圈12个副边线圈的设计方案。原边线圈串联汽车级MOSFET(即Sp1)连接至电池包的正负极。每个副边线圈串联汽车级MOSFET(即S1,S2—Sn)连接至每个电池单元的正负极。这样组成一个反激模式的双向电源来进行能量转移。
控制原边线圈的MOSFET(即Sp1)采用IPD70N10S3L,耐压100V、Rdson为11.5m? ,可工作在12节电池串联产生的30~60V电压状态下,满足多种锂电池如磷酸铁锂、锰酸锂、三元材料电池等应用需求。对于电压平台较低的磷酸铁锂电池或者节数较少时,也可采用耐压稍低但Rdson较小的MOSFET来提高系统效率。如耐压75V、Rdson达到6.5 m? 的IPB100N08S2。
控制副边线圈的MOSFET(即S1,S2—Sn)采用IPG20N04S4L,耐压40V、Rdson为7.6 m?,可满足控制单节电池能量转移的需求。IPG20N04S4L的另一个好处是它在很小的封装里集成了两只独立的MOSFET,为电路板布局节省了较多空间。为了进一步提高效率还可选用更小Rdson的产品,如IPD90N03S4L、IPB180N03S4L等。
3.2 软件部分
控制上述MOSFET工作的是汽车级8位单片机XC886CM,该单片机具有8通道10位AD,可以方便的采集各个电池单元的电压数据和温度数据。QFP-48的封装使它有足够的IO完成多达13个MOSFET的控制工作。CAN、SPI、UART等丰富的通信接口使子节点具有CAN总线通信功能之外,能够实现和PC的通信,以方便试验阶段的控制和演示。硬件乘除单元MDU可进行16位数据的乘除,实现快速运算。
子节点软件负责图3.2.1所示的功能实现,执行状态机。
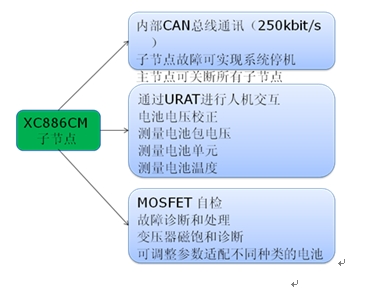
图3.2.1:子节点软件功能。
采用一个反激式变压器作为核心,通过磁场与电场的转换,实现能量在单个电池单元与整个电池组间双向传递。当某节电池电压过高时,可以通过并接在该电池上的绕组将多余的能量转移到整个电池组上去,这个过程我们称之为顶部均衡法。当某节电池电压过低时,通过接在电池组上的绕组可以把电池组的能量转移到该节电池上,这个过程我们称之为底部均衡法。
图2:反激式平衡电路原理及典型波形。
2.1 顶部均衡
如果某个电池单元的电压高于其他单元,那么就需要将其中的能量导出,这在充电模式下尤其必要。如果不进行均衡,充电过程在第一块电池单元充满之后就不得不立即停止。均衡可以保持所有电池单元的电压相等而避免发生过早停止充电的情况。图2.1给出了顶部平衡模式下的能量流动情况。在电压扫描之后,发现电池单元5 是整个电池组中电压最高的单元。此时闭合开关sec5,电流从电池流向变压器。在开关sec5 断开后闭合主开关,此时,变压器就从储能模式进入了能量输出模式。能量通过初级线圈送入整个电池组。
图2.1:顶部均衡原理。
2.2 底部均衡
底部均衡法中的电流和时序条件与顶部均衡法非常类似,只是顺序和电流的方向与顶部均衡法相反。扫描发现电池单元2 是最弱的单元,必须对其进行补充充电。此时闭合主开关“( prim”),电池组开始对变压器充电。主开关断开后,变压器存储的能量就可以转移至选定的电池单元。相应的次级“( sec”)开关在本例中是开关sec2 闭合后,就开始能量转移。尤其是当某个电池单元的电压已经达到SoC 的下限时,底部平衡法能够帮助延长整个电池组的工作时间。只要电池组提供的电流低于平均平衡电流就能持续放电,直到最后一块电池单元也被耗尽。
图2.2:顶部均衡原理。
2. 3 电池组间均衡法
如图2.3所示,闭合其中一个电池组的电子开关SP1 和SP2,就可以对最左边的绕组的初级进行充电,之后关闭SP1和SP2,就可以把能量放入总电池组中。这样就可以实现更多电池单体的串联。
图2.3:组间平衡。
2.4 电压检测
为了对每个电池的荷电状态进行管理,每个电池的电压都要加以测量。由于只有1号电池处于微控制器模数转换范围内,因此不能直接测量电池块中其他电池的电压。一种可能的方案是采用差分放大器阵列,但这需要保持整个电池块的电压水平。
下面提出一种只需添加少量硬件就可以检测所有电池电压的方法。变压器的主要作用是电荷平衡,但同时我们也可将它作为多路复用器使用。在电压检测模式下,变压器的反激模式没有被使用。当S1至SN开关中的某一个闭合时,所接通的电池的电压被传输至变压器的所有绕组。经过一个分立滤波器简单的预处理,检测信号被输入至微控制器ADC输入管脚。S1至SN中的任一开关闭合时所产生的检测脉冲的持续时间非常短暂,实际的导通时间可能只有4μs,因此变压器中存储的能量并不多。当该开关断开后,磁场中存储的能量将通过主晶体管馈回整个电池块,因此电池块的能量不受影响。对全部电池扫描一遍后,一个扫描周期结束,系统回到初始状态。也就读取了电池组中每一节电池的电压信号。
3 设计方案
3.1 硬件部分
电池管理系统采用独立的内部CAN总线进行数据和指令传输,每个内部CAN总线子节点电路和最大12节串联电池单元相连,组成电池包。各个电池包串联组成电动汽车所需的电池总成。主节点采用汽车级16位单片机XC2267连接内部CAN网络,同时接入电动汽车上的公共CAN网络,收发相关的指令和数据。见图3.1.1
图3.1.1:电池管理系统框图。
每个子节点可对所在电池包的12节电池进行SOC监测并执行电池均衡功能。见图3.1.2
图3.1.2:子节点电路示意图。
子节点变压器采用1个原边线圈12个副边线圈的设计方案。原边线圈串联汽车级MOSFET(即Sp1)连接至电池包的正负极。每个副边线圈串联汽车级MOSFET(即S1,S2—Sn)连接至每个电池单元的正负极。这样组成一个反激模式的双向电源来进行能量转移。
控制原边线圈的MOSFET(即Sp1)采用IPD70N10S3L,耐压100V、Rdson为11.5m? ,可工作在12节电池串联产生的30~60V电压状态下,满足多种锂电池如磷酸铁锂、锰酸锂、三元材料电池等应用需求。对于电压平台较低的磷酸铁锂电池或者节数较少时,也可采用耐压稍低但Rdson较小的MOSFET来提高系统效率。如耐压75V、Rdson达到6.5 m? 的IPB100N08S2。
控制副边线圈的MOSFET(即S1,S2—Sn)采用IPG20N04S4L,耐压40V、Rdson为7.6 m?,可满足控制单节电池能量转移的需求。IPG20N04S4L的另一个好处是它在很小的封装里集成了两只独立的MOSFET,为电路板布局节省了较多空间。为了进一步提高效率还可选用更小Rdson的产品,如IPD90N03S4L、IPB180N03S4L等。
3.2 软件部分
控制上述MOSFET工作的是汽车级8位单片机XC886CM,该单片机具有8通道10位AD,可以方便的采集各个电池单元的电压数据和温度数据。QFP-48的封装使它有足够的IO完成多达13个MOSFET的控制工作。CAN、SPI、UART等丰富的通信接口使子节点具有CAN总线通信功能之外,能够实现和PC的通信,以方便试验阶段的控制和演示。硬件乘除单元MDU可进行16位数据的乘除,实现快速运算。
子节点软件负责图3.2.1所示的功能实现,执行状态机。
图3.2.1:子节点软件功能。
集成电路 电动汽车 电压 电流 电路 变压器 电阻 电容 电感 单片机 MOSFET SoC 电子 放大器 滤波器 ADC 总线 CAN总线 相关文章:
- Power Integrations推出智能电表技术应用网页和参考设计(08-23)
- 面向电动车窗/天窗应用的集成嵌入式功率半导体(05-12)
- OSEK COM通信规范的通信系统研究(06-03)
- 车音响功放集成电路代换技巧(06-13)
- 在汽车中驱动LED照明的开关(07-15)
- 采用多功能混合信号管脚实现汽车IC的高效益低成本测试(07-06)