汽车防盗报警监控系统的设计
时间:12-18
来源:互联网
点击:
汽车日益成为人们生活中不可缺少的部分,然而,令汽车用户担忧的是车辆被盗现象呈逐年上升趋势。本文旨在设计一个方便可靠,功能强大的汽车报警器。当汽车遭遇到危险情况时,立即启动警报,同时发送相应信息到指定的手机上,通知车主有异常情况。车主可以通过手机监听车内情况并控制汽车,以有效地防止汽车被盗。此外,若在车内加一个紧急按钮,不仅可以在车主遇到抢劫或其他危险情况时,向外界求助,也可以帮助警方对车子进行定位。考虑到时间和成本问题,本文仅针对振动信息的检测、车辆信息的传输与控制问题进行重点研究。
振动信息检测
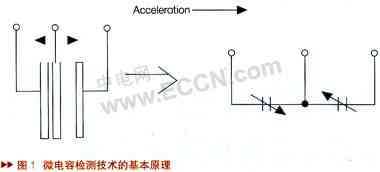
图1中,当物体有向右的加速度时,由于惯性,中间挡板与电容板间距随之变化,从而造成电容值的变化(也有通过改变电容板的面积实现电容变化的)。经过后续开关电容、单位增益放大、电荷放大电路等一系列处理就可以得到与加速度信息成正比关系的电压信号。系统采用的MMA7260QT加速度传感器就是基于上述原理。
传统的防盗报警器侧重于对瞬时振动、冲击的检测,虽然可以识别出车门遭遇暴力打开的情况,但极易造成误判报警(如附近的异响导致报警)。针对以上问题,本文采取了以下三点改进措施:
(1)增加了对车门打开动作的检测,提取车门打开时的加速度信息作为车辆被盗的依据之一。
(2)适当选取车门被暴力打开的特征时间,而不是单纯依靠加速度峰值越界作为车辆被盗的依据。
(3)增加了对车体倾斜角度的测量,防范拖车和整车搬运等盗窃手段。
车辆信息的传输与控制
将传统防盗报警技术与现代GSM数字移动通信技术相结合,就可以实现车辆状态监控、调度、防盗报警、防劫报警、远程控制、跟踪定位、车载电话等功能。系统采用SIEMENS公司的TC35i GSM Modem模块,这样就可以突破空间限制,将车辆信息通过GSM网络传送至全球各地。由于系统需要众多功能模块的支持,限于时间和成本问题,本文仅通过以下两点验证了系统的可行性和实用性:
(1)将车辆的当前状态发送到指定的手机上,要求能够分辨出车辆被窃的信息来源:车门振动、车辆倾角异常、非法人员进入等。
(2)手机发送指令到GSM Modem模块上,要求只有设定的手机号码才能得到系统的控制权,能够区分不同的控制指令并执行。
系统概述
系统结构框图
如图2所示:以MC9S08QG8单片机为核心,辅以MMA7260QT加速度模块、HOLUX GM-82 GPS模块、TC35i GSM Modem模块等功能模块实现对汽车的实时监控。电源部分拟采用车载蓄电池做主电源;一旦主电源被切断,即切换到内置电池供电,进入节能模式,有效工作达数月以上。

系统硬件
MC9S08QG8单片机及其外围电路
该型号单片机是Freescale公司主推的8位单片机,它的几项内置功能与汽车防盗报警系统的要求正好吻合,所以用它作系统核心。
单片机的最小系统使用Synhayato公司的CT298开发板。基板主要由以下几部分组成:单片机(MC9S08QG8)、USB-mini B型连接器、电源和复位开关、USB-COM转换器(FT232R)、BDM工具连接头、输入输出器件(按钮键,LED灯,蜂鸣器)、MM-2860用插座、外部扩展连接槽(栅距为1mm、16引脚扁电缆连接槽)和测试端口。
MMA7260QT加速度模块及其外围电路
现代汽车的防盗系统通常采用对车体的冲击、振动监测的方式预警,常用的器件多为磁效应传感器。由于磁效应加速度传感器自身的一些问题,会使得后续信号处理电路和微控制器接口电路复杂,致使系统报警的可靠性降低,误报率较高。另外,对付拖车或整车搬运最有效的方法是对车体的倾斜角度进行监测,而磁效应传感器无法测量静态加速度,不能对车体的倾斜角度进行测量。MMA7260QT是Freescale公司设计生产的单芯片集成三轴加速度传感器,它可以对车体微小振动和整车的倾斜角度同时进行监测。将其应用于汽车防盗系统不但扩大了系统的监测范围,而且简化了系统,提高了防盗系统报警的可靠性。MMA7260Q的内部模块结构是在单一芯片上集成三个相互独立、测量方向相互垂直的敏感元的测量模块,是由多晶硅微加工表面工艺制成的电容式加速度传感器;由硅片表面的弹性结构支撑起的质量块下面贴附电容的一个极板,电容的另一极板固定。当加速度引起质量块的相对位置变化时,电容值也发生变化,然后经过电容电压转化电路和放大滤波电路后输出与加速度成正比的电压信号。
TC35i GSM Modem模块
TC35i 是Siemens公司推出的新一代GSM通信模块。TC35i无线模块尺寸小巧,安装设计灵活,易于集成且功耗低。模块有AT命令集接口,支持文本和PDU模式的短消息、第三组的二类传真、以及2.4k、4.8k、9.6k的非透明模式。TC35i模块主要由GSM基带处理器、GSM射频模块、供电模块(ASIC)、闪存、ZIF连接器、天线接口六部分组成。作为TC35i的核心,基带处理器主要处理GSM终端内的语音、数据信号,并涵盖了蜂窝射频设备中的所有的模拟和数字功能。在不需要额外硬件电路的前提下,可支持FR、HR和EFR语音信道编码。
其它辅助电路
除了上述主要功能电路外,系统还包括一些辅助电路。它们主要是:3.3V稳压电源(CT-298开发板上的稳压电源提供的电流有限,不能负担整个系统的供电),由TI公司的TLV2217-33 LDO和一些电容构成,能够提供500mA的电流;串口电平转化电路(方便与TC35i进行连接通信),主要由MAXIM公司的MAX3232构成,提供TTL电平与232C电平的转化;LED指示灯驱动电路以及按键电路等。
系统软件
系统软件的整体设计思路
系统主要包含四种工作状态:停车状态、行驶状态、被盗状态和被抢状态。单片机首先判别停车状态和行驶状态,这主要依靠密钥识别技术实现。密钥识别有很多种,本文设想采用射频识别技术(RFID,Radio Frequency Identification)。它的基本原理是利用射频方式进行非接触双向通信,以达到识别目的,并交换数据。RFID系统的射频卡和读卡器之间不用接触就可完成识别,通过对RFID卡进行读写操作,可实现对各类物体或设备(人员、物品)在不同状态(移动、静止或恶劣环境)下的自动识别和管理。RFID卡可存储128字节的数据,前4字节为ID号,该ID号是全球唯一的,可作为车主身份识别标志,剩余字节可用于存储一些辅助的校验信息。
在停车模式下,单片机会依次检测振动信息、倾角信息、车门信息、点火信息、人员信息是否正常,系统将综合上述信息判断车辆状态。如果判断结论为车辆被盗,则系统进入被盗模式。系统会首先将信息发送给车主,然后将控制权交予车主,车主可以查询车辆的位置、车内的人员信息,还可以进行启动高分贝声光报警,关闭发动机、断油断电等操作。如果结论是车辆正常,则系统回到起始状态,再次循环。在行驶模式下,系统将不断查询求救按钮是否按下,一旦求救按钮按下,车辆将进入被抢模式。系统会首先将信息发送到指定的手机号码上(例如车主朋友),然后控制权交予控制中心(通过指定的手机号码),控制中心同样可以执行上述控制操作。
振动、倾角信息的提取和判别
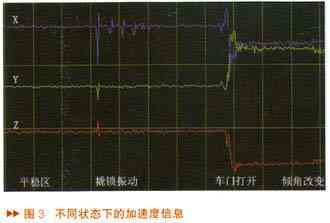
由上文可知,我们需要从加速度信息中提取出以下三种信息:撬锁时车体振动、车门打开时的加速度信号、车辆的倾角变化。它们的波形如图3所示,在正常情况下,如图中的平稳区所示,X、Y、Z三个方向的加速度基本不变(但是有轻微的扰动)。有人撬锁时,加速度值会出现一个减幅震荡的过程,震荡的周期很短,只有十几毫秒。而在车门打开的过程中,加速度值会出现一个很大的变化,并且持续的时间较长,能达到上百毫秒。
经分析我们可以发现,撬锁振动和车门打开时的加速度值都与加速度变化的速度有关,更适合用差分来表示;倾角的变化只与加速度值变化的大小有关,而与变化的速度无关,可以直接用当前的加速度来表示。针对声波振动所造成的误报,本文采用两种办法:由于声波振动的频率远高于撬锁振动的频率,适当降低ADC的采样频率就可以滤去大部分,系统的采样频率是1000Hz;若干项相邻差分值加权平均,这相当于低通滤波的作用,也可以滤除声波造成的振动,系统采用3项加权平均。假设ADC采样量化后的值为
A=a(1)+…+a(i-1)+a(i)+a(i+1)+…
加权系数为M1、M2、M3,则加权平均处理的公式为
b(i)=[M1*a(i-1)+M2*a(i)+M3*a(i+1)]/(M1+M2+M3)
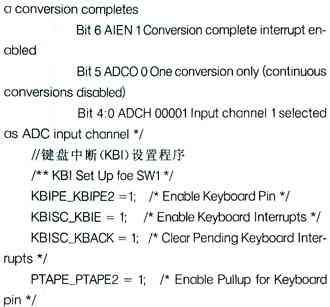
对于倾角的检测通过现在的加速度值与平稳状态下的加速度值作差得到,设初始加速度值为a(0),则当a(i)-a(0)的绝对值大于设定值时即可认为倾角变化超标,启动报警。ADC初始化的部分程序如下:

车辆信息的传输与控制
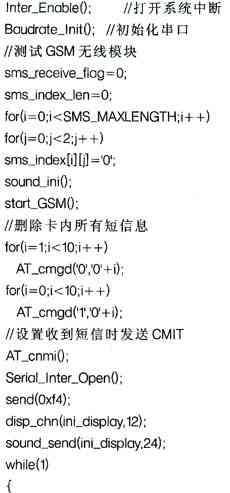
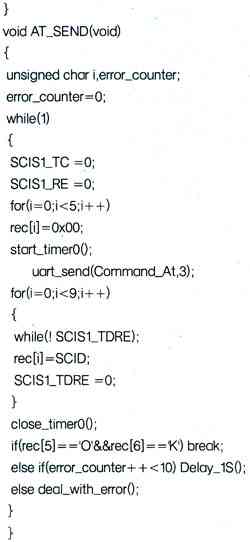
车辆信息的传输与控制主要依靠的是Siemens公司的TC35i GSM Modem模块。单片机通过串口对TC35i写AT指令,从而达到信息的传输与接收的目的。
单片机控制TC35i收发信息的主要程序如下:
MC9S08QG8单片机编程注意事项
MC9S08QG8单片机不同于一般的51单片机,在编程时有一些值得注意的地方,特列举如下:
1) SOPT1寄存器写入问题:SOPT1是一个单次写入寄存器,每次复位后只能写一次。所以它的每个位要一次写入,而不能分多次写。比如下面语句
则单片机只认为第一条指令有效,而后面的语句无效。这样就造成外部中断复位脚可用,看门狗定时器却不能关闭。应该写成以下形式
2)片内起振状态下ICS Trim Register (ICSTRM)寄存器一定要设置。这个寄存器就是用来调节内部振荡器的时钟频率的,因为内部振荡器是采用半导体工艺制成的,不同芯片的振荡频率会有偏差,Trim寄存器就用来调整这个偏差。调整值一般在出厂时就写在芯片的固定位置上了,直接使用即可。但是BDM调试时会根据设定的频率对其进行调整(可能与上电复位的初始值不同),将造成时钟频率微小改变,从而BDM调试状态与掉电复位后的时钟频率不同,在SCI通信时造成波特率不准。
振动信息检测
图1中,当物体有向右的加速度时,由于惯性,中间挡板与电容板间距随之变化,从而造成电容值的变化(也有通过改变电容板的面积实现电容变化的)。经过后续开关电容、单位增益放大、电荷放大电路等一系列处理就可以得到与加速度信息成正比关系的电压信号。系统采用的MMA7260QT加速度传感器就是基于上述原理。
传统的防盗报警器侧重于对瞬时振动、冲击的检测,虽然可以识别出车门遭遇暴力打开的情况,但极易造成误判报警(如附近的异响导致报警)。针对以上问题,本文采取了以下三点改进措施:
(1)增加了对车门打开动作的检测,提取车门打开时的加速度信息作为车辆被盗的依据之一。
(2)适当选取车门被暴力打开的特征时间,而不是单纯依靠加速度峰值越界作为车辆被盗的依据。
(3)增加了对车体倾斜角度的测量,防范拖车和整车搬运等盗窃手段。
车辆信息的传输与控制
将传统防盗报警技术与现代GSM数字移动通信技术相结合,就可以实现车辆状态监控、调度、防盗报警、防劫报警、远程控制、跟踪定位、车载电话等功能。系统采用SIEMENS公司的TC35i GSM Modem模块,这样就可以突破空间限制,将车辆信息通过GSM网络传送至全球各地。由于系统需要众多功能模块的支持,限于时间和成本问题,本文仅通过以下两点验证了系统的可行性和实用性:
(1)将车辆的当前状态发送到指定的手机上,要求能够分辨出车辆被窃的信息来源:车门振动、车辆倾角异常、非法人员进入等。
(2)手机发送指令到GSM Modem模块上,要求只有设定的手机号码才能得到系统的控制权,能够区分不同的控制指令并执行。
系统概述
系统结构框图
如图2所示:以MC9S08QG8单片机为核心,辅以MMA7260QT加速度模块、HOLUX GM-82 GPS模块、TC35i GSM Modem模块等功能模块实现对汽车的实时监控。电源部分拟采用车载蓄电池做主电源;一旦主电源被切断,即切换到内置电池供电,进入节能模式,有效工作达数月以上。
系统硬件
MC9S08QG8单片机及其外围电路
该型号单片机是Freescale公司主推的8位单片机,它的几项内置功能与汽车防盗报警系统的要求正好吻合,所以用它作系统核心。
单片机的最小系统使用Synhayato公司的CT298开发板。基板主要由以下几部分组成:单片机(MC9S08QG8)、USB-mini B型连接器、电源和复位开关、USB-COM转换器(FT232R)、BDM工具连接头、输入输出器件(按钮键,LED灯,蜂鸣器)、MM-2860用插座、外部扩展连接槽(栅距为1mm、16引脚扁电缆连接槽)和测试端口。
MMA7260QT加速度模块及其外围电路
现代汽车的防盗系统通常采用对车体的冲击、振动监测的方式预警,常用的器件多为磁效应传感器。由于磁效应加速度传感器自身的一些问题,会使得后续信号处理电路和微控制器接口电路复杂,致使系统报警的可靠性降低,误报率较高。另外,对付拖车或整车搬运最有效的方法是对车体的倾斜角度进行监测,而磁效应传感器无法测量静态加速度,不能对车体的倾斜角度进行测量。MMA7260QT是Freescale公司设计生产的单芯片集成三轴加速度传感器,它可以对车体微小振动和整车的倾斜角度同时进行监测。将其应用于汽车防盗系统不但扩大了系统的监测范围,而且简化了系统,提高了防盗系统报警的可靠性。MMA7260Q的内部模块结构是在单一芯片上集成三个相互独立、测量方向相互垂直的敏感元的测量模块,是由多晶硅微加工表面工艺制成的电容式加速度传感器;由硅片表面的弹性结构支撑起的质量块下面贴附电容的一个极板,电容的另一极板固定。当加速度引起质量块的相对位置变化时,电容值也发生变化,然后经过电容电压转化电路和放大滤波电路后输出与加速度成正比的电压信号。
TC35i GSM Modem模块
TC35i 是Siemens公司推出的新一代GSM通信模块。TC35i无线模块尺寸小巧,安装设计灵活,易于集成且功耗低。模块有AT命令集接口,支持文本和PDU模式的短消息、第三组的二类传真、以及2.4k、4.8k、9.6k的非透明模式。TC35i模块主要由GSM基带处理器、GSM射频模块、供电模块(ASIC)、闪存、ZIF连接器、天线接口六部分组成。作为TC35i的核心,基带处理器主要处理GSM终端内的语音、数据信号,并涵盖了蜂窝射频设备中的所有的模拟和数字功能。在不需要额外硬件电路的前提下,可支持FR、HR和EFR语音信道编码。
其它辅助电路
除了上述主要功能电路外,系统还包括一些辅助电路。它们主要是:3.3V稳压电源(CT-298开发板上的稳压电源提供的电流有限,不能负担整个系统的供电),由TI公司的TLV2217-33 LDO和一些电容构成,能够提供500mA的电流;串口电平转化电路(方便与TC35i进行连接通信),主要由MAXIM公司的MAX3232构成,提供TTL电平与232C电平的转化;LED指示灯驱动电路以及按键电路等。
系统软件
系统软件的整体设计思路
系统主要包含四种工作状态:停车状态、行驶状态、被盗状态和被抢状态。单片机首先判别停车状态和行驶状态,这主要依靠密钥识别技术实现。密钥识别有很多种,本文设想采用射频识别技术(RFID,Radio Frequency Identification)。它的基本原理是利用射频方式进行非接触双向通信,以达到识别目的,并交换数据。RFID系统的射频卡和读卡器之间不用接触就可完成识别,通过对RFID卡进行读写操作,可实现对各类物体或设备(人员、物品)在不同状态(移动、静止或恶劣环境)下的自动识别和管理。RFID卡可存储128字节的数据,前4字节为ID号,该ID号是全球唯一的,可作为车主身份识别标志,剩余字节可用于存储一些辅助的校验信息。
在停车模式下,单片机会依次检测振动信息、倾角信息、车门信息、点火信息、人员信息是否正常,系统将综合上述信息判断车辆状态。如果判断结论为车辆被盗,则系统进入被盗模式。系统会首先将信息发送给车主,然后将控制权交予车主,车主可以查询车辆的位置、车内的人员信息,还可以进行启动高分贝声光报警,关闭发动机、断油断电等操作。如果结论是车辆正常,则系统回到起始状态,再次循环。在行驶模式下,系统将不断查询求救按钮是否按下,一旦求救按钮按下,车辆将进入被抢模式。系统会首先将信息发送到指定的手机号码上(例如车主朋友),然后控制权交予控制中心(通过指定的手机号码),控制中心同样可以执行上述控制操作。
振动、倾角信息的提取和判别
由上文可知,我们需要从加速度信息中提取出以下三种信息:撬锁时车体振动、车门打开时的加速度信号、车辆的倾角变化。它们的波形如图3所示,在正常情况下,如图中的平稳区所示,X、Y、Z三个方向的加速度基本不变(但是有轻微的扰动)。有人撬锁时,加速度值会出现一个减幅震荡的过程,震荡的周期很短,只有十几毫秒。而在车门打开的过程中,加速度值会出现一个很大的变化,并且持续的时间较长,能达到上百毫秒。
经分析我们可以发现,撬锁振动和车门打开时的加速度值都与加速度变化的速度有关,更适合用差分来表示;倾角的变化只与加速度值变化的大小有关,而与变化的速度无关,可以直接用当前的加速度来表示。针对声波振动所造成的误报,本文采用两种办法:由于声波振动的频率远高于撬锁振动的频率,适当降低ADC的采样频率就可以滤去大部分,系统的采样频率是1000Hz;若干项相邻差分值加权平均,这相当于低通滤波的作用,也可以滤除声波造成的振动,系统采用3项加权平均。假设ADC采样量化后的值为
A=a(1)+…+a(i-1)+a(i)+a(i+1)+…
加权系数为M1、M2、M3,则加权平均处理的公式为
b(i)=[M1*a(i-1)+M2*a(i)+M3*a(i+1)]/(M1+M2+M3)
对于倾角的检测通过现在的加速度值与平稳状态下的加速度值作差得到,设初始加速度值为a(0),则当a(i)-a(0)的绝对值大于设定值时即可认为倾角变化超标,启动报警。ADC初始化的部分程序如下:
车辆信息的传输与控制
车辆信息的传输与控制主要依靠的是Siemens公司的TC35i GSM Modem模块。单片机通过串口对TC35i写AT指令,从而达到信息的传输与接收的目的。
单片机控制TC35i收发信息的主要程序如下:
MC9S08QG8单片机编程注意事项
MC9S08QG8单片机不同于一般的51单片机,在编程时有一些值得注意的地方,特列举如下:
1) SOPT1寄存器写入问题:SOPT1是一个单次写入寄存器,每次复位后只能写一次。所以它的每个位要一次写入,而不能分多次写。比如下面语句
则单片机只认为第一条指令有效,而后面的语句无效。这样就造成外部中断复位脚可用,看门狗定时器却不能关闭。应该写成以下形式
2)片内起振状态下ICS Trim Register (ICSTRM)寄存器一定要设置。这个寄存器就是用来调节内部振荡器的时钟频率的,因为内部振荡器是采用半导体工艺制成的,不同芯片的振荡频率会有偏差,Trim寄存器就用来调整这个偏差。调整值一般在出厂时就写在芯片的固定位置上了,直接使用即可。但是BDM调试时会根据设定的频率对其进行调整(可能与上电复位的初始值不同),将造成时钟频率微小改变,从而BDM调试状态与掉电复位后的时钟频率不同,在SCI通信时造成波特率不准。
电容 电路 电压 传感器 单片机 GPS Freescale USB 连接器 LED 射频 稳压电源 电流 LDO RFID ADC 51单片机 看门狗 振荡器 半导体 相关文章:
- 替代能源中的超级电容器介绍(11-30)
- 超级电容器改善汽车启动性能(11-30)
- 如何为具可靠性的汽车应用选择正确的电容器(01-06)
- 电容传感器在汽车中的应用(01-18)
- 电动汽车驱动系统中的超级电容原理(05-21)
- 电动汽车驱动系统中的超级电容原理及应用 (05-28)