基于MM908E625和Low-G的汽车驾驶监控仪设计
时间:12-03
来源:互联网
点击:
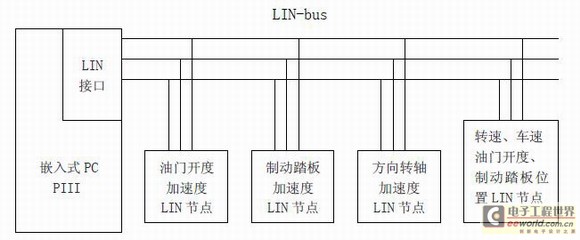
图(1)硬件系统结构框图
2.加速度计LIN子节点
(1).速度计LIN子节点原理图(2)及加速度测量模块图(3):

图(2)LIN子节点原理图图(3)测量模块
(2).加速度计LIN子节点的设计及结构安装:
MMA6260Q为XY双轴向传感器,为保证获得较理想的加速度测量,加速度计设计成带LIN接口,物理尺寸为5X5X2CM的测量模块,直接安装在油门开度踏板、制动踏板和方向转轴上。油门开度踏板和制动踏板测量模块垂直安装,确保X轴方向可测量踏板的加速度信号,Y轴方向测量车辆运行中平均震动信号。方向转轴测量模块水平安装,确保XY轴方向可测量方向盘转向的加速度信号。
3.传感器简介
除用于加速度测量的Low-G外,还有以下传感器。
节气门(油门)开度传感器:节气门由驾驶员操纵,直接反映驾驶员的控制意图,因此是判断发动机工况的重要信号。节气门位置传感器安装在节气门轴的尾端,采用霍尔线性传感器。经传感器信号调理板处理后,由LIN子节点测量模块检测搜企网,节气门完全关闭时,传感器输出电压等于0V;节气门完全打开时,输出电压等于5V。当节气门不断开大时,其输出电压随之线形增加。
发动机转速、车速传感器:采用霍尔脉冲式。经传感器信号调理板脉冲整形电路处理之后,由主芯片的输入捕捉口进行脉冲捕捉。对应发动机转速1500rpm-8000rpm的范围,接口板输出对应0V-5V变化。对应车速60KM/h-180KM/h的范围,接口板输出对应0V-5V变化。
三、智能控制(模糊控制器)设计
汽车驾驶状态(疲劳驾驶)监控的对象是相当复杂的系统控制问题,是属于多输入-多输出的模糊控制系统范畴。人的驾驶习惯,不同的路况,不同驾驶时段反映到对车辆的操控,会产生相当不同的汽车驾驶状态。
各种对车辆的操控,作为输入量,表现为节气门(油门)开度、制动踏板的位置、发动机转速、车速的变化、速度的变化(即加速度),方向盘转向的角度和角加速度等。车辆在不同的路况下产生的震动作为输入量,也会影响到传感器的测量,特别是对加速度传感器的影响,对震动信号由LIN子节点测量模块按“平均震动信号强度”在信号预处理程序中减弱或消除。作为输出量,表现为对车辆的驾驶状态的优劣,分为“好”、“中”、“差”三个等级。在设计控制规则库时,把多输入-多输出模糊控制结构化为多输入-单输出模糊控制结构,然后按单输入-单输出模糊控制系统的方法设计,实现多变量控制系统的模糊解耦。
实验数据表明,疲劳驾驶阶段,反映到汽车驾驶状态上,表现为对节气门(油门)开度、制动踏板和方向盘转向的加速度信号的改变比正常驾驶时期的加速度信号的改变在信号的幅值和频度有明显的不同。本课题采用FreeScale的Low-G系列双轴向加速度传感器MMA6260Q,对所需的加速度信号能准确地、实时地采集,作为模糊控制器的输入变量的一个重要参数。
本研究课题早期对疲劳驾驶的研究主要通过测量油门开度、制动踏板位置和发动机转速、车速的变化等参数,这些参数间接地、滞后地反映驾驶状态的变化,这些参数可作为模糊控制器在各种不同驾驶状态的限定条件,结合加速度的测量,建立模糊控制规则。
对应于油门开度、制动踏板位置和方向盘转向轴三种类型的变量建立三套模糊控制器模型,以下以油门开度作为变量说明模糊控制器的设计。
1.糊化过程
设油门开度模糊控制的输入量分别为油门开度s,发动机转速n、车速v和油门开度加速度a。将加速度划分成“负大NB”、“负小NS”、“零ZE”、“正小PS”、“正大PB”五个等级(即五个模糊子集)。控制器的输出为对车辆的驾驶状态的优劣(以H表示),分为“好GOOD”、“中MIDDLE”、“差BAD”三个等级。为了实现模糊化,确定油门开度加速度a模糊子集的隶属度函数如下图(4)所示。为了按照一定的语言规则进行模糊推理,确定输出量即反映驾驶状态的优劣的隶属度函数如下图(5)所示。
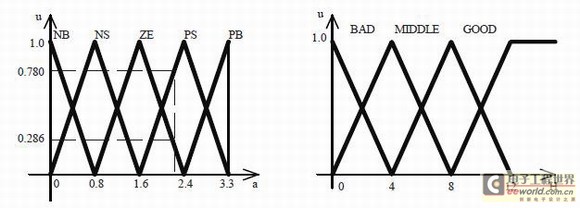
图(4)加速度a隶属度函数图图(5)驾驶状态隶属度函数图
2.模糊控制规则的建立
对应于油门开度模糊控制规则库的建立,与油门开度s,发动机转速n、车速v在不同的数值范围的取值具有交互性和关联性。规则库的建立需要在程序运行中不断搜集数据,通过自学习确定方法和模糊规则的自调整,在实验过程中不断修正和完善。
模糊控制规则重点处理影响车辆驾驶状态的优劣“差”和“中”的工作过程。其中,“差”驾驶状态的规则对应于油门开度s分为0,1,2-9共十段,发动机转速n分为1000rpn、1500rpn-5500rpm共十段,车速v分为60km/h、70km/h-150km/h共十段,和加速度划分成“负大NB”、“负小NS”、“零ZE”、“正小PS”、“正大PB”五个等级,可归纳为有效控制规则八十六条规则。
模糊控制规则(L)公式:如果(IF)油门开度s为x段[和(AND)]V[或(OR)]发动机转速n为y段[和(AND)]V[或(OR)]车速v为z段,且加速度为等级m,则(THEN)驾驶状态为“S”。
红外 无线电 电子 嵌入式 Freescale 传感器 总线 LCD MCU DSP 触摸屏 电压 加速度计 电路 C语言 单片机 相关文章:
- 资深车友教您红外汽车引擎锁如何使用(10-23)
- 基于ARM的红外光汽车速度管理系统研究(10-26)
- 如何使用红外汽车引擎锁(01-08)
- 红外遥控技术在汽车中的应用(07-19)
- 基于DSP的疲劳驾驶检测系统的研究(05-09)
- 基于单片机的疲劳驾驶检测仪设计(08-22)