由CVT和TCU组成的汽车的无级变速系统
时间:12-01
来源:互联网
点击:
车辆自动变速是汽车电控技术的一个重要组成部分。采用计算机和电力电子驱动技术实现车辆自动变速,能消除驾驶员换档技术的差异,减轻驾驶员的劳动强度,提高行车安全性,提高车辆的动力性和经济性。汽车的无级变速系统一般是由无级变速箱CVT(Continuously Variable Transmission) 和无级变速箱控制器TCU(Transmission Control Unit)组成。
1 CVT的基本结构
汽车的无级变速系统主要有以下几种形式:(1)液力机械AT—HMT(Hydrodynamic Mechanical Transmission)广泛应用于轿车、公共汽车、重型车辆、商用车和工程车辆上。(2)机械式AT—AMT(Automa ted Mechanical Transmission)在通常机械式变速器基础上加上微机控制电液伺服操纵自动换档机构组成,目前它应用于部分低档轿车、局部卡车和商用车上。(3)无级式AT—CVT(Continuously Variable Transmission)是目前在小排气量轿车中使用最多的一种。它的主要结构和工作原理如图1所示。
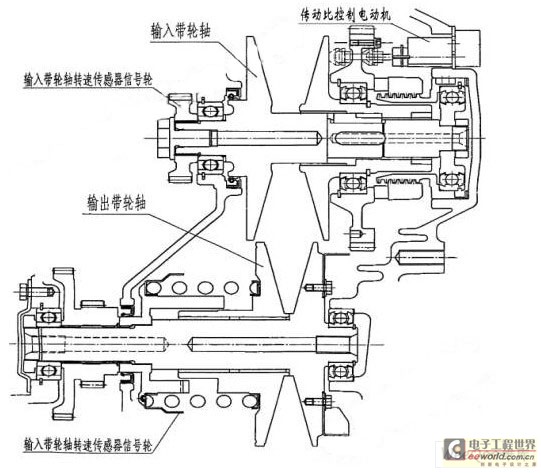
图1 无级式AT—CVT主要结构和工作原理
CVT技术的发展,已经有了一百多年的历史。德国奔驰公司是在汽车上采用CVT技术的鼻祖,早在1886年就将V型橡胶带式CVT安装在该公司生产的汽油机汽车上。但由于结构设计和选材等方面的问题,该传动机构体积过大,传动比过小,无法满足汽车行驶的要求。这些缺点限制了它的应用。直到1979年,通过结构的改进和特殊钢带的使用,CVT的传动比明显提高,具备了在车辆上广泛应用的前提条件。从那时起,福特、菲亚特和日产等公司的车型都曾采用过这种变速传动机构。
CVT采用的V形承推钢带由安装在挠性马氏体时效钢圈上的多片楔形钢片构成。它的动力从主动轮输入,经过V形钢带,由从动轮输出。带轮由可以相对滑动的两部分构成。钢带位于这两部分间的凹槽内。当带轮两部分靠紧时,凹槽较窄,钢带位于带轮外缘,此时带轮的工作直径最大。随着这两部分间的相对滑动,凹槽越来越宽,钢带逐渐靠近带轮中心,即工作直径最小的地方。汽车刚刚起动车速较低时,主动轮工作直径较小,变速器可得到较大的传动比,使汽车获得足够动力克服行驶阻力。随着车速的升高,主动轮工作直径逐渐增大,从动轮工作直径越来越小,变速器传动比也相应减小。由于带轮工作直径可连续变化,因此这种变速器的传动比也是无级、连续变化的,传递动力更平稳,其动力性和经济性远远高于行星齿轮式自动变速器。汽车在实际运行中变速箱变比的控制是由TCU控制直流电动机自动完成的。
2 TCU的基本结构
TCU的基本结构如图2所示,它由单片机、检测电路、驱动电路、电源电路以及通讯电路等部分组成。

图2 TCU的基本结构
单片机是采用美国Microchip公司2002年3月推出的单片PIC18F452,它在功能上可以满足TCU的要求,在性能上它具有低功耗、工作温度范围宽,并且可在较低的电压下正常工作,特别适用于汽车电器。检测电路分为脉冲检测、开关量检测以及模拟量检测。脉冲检测又分为脉冲计数和脉冲宽度检测。如发动转速、输入、输出轴转速的测量是采用脉冲计数方式。节气门开度则是采用脉冲宽度测量的方式。
模拟量的测量主要由滤波电路、放大电路组成。A/D转换是采用单片机内自带的10位A/D转换器。变速箱的变比控制是由直流电动机驱动的。在TCU中是由4支MOSFET组成的H型电路实现对电动机的正反转PWM控制。电磁离合器的电流也是通过MOSFET驱动的。在驱动电路中除主开关元件、续流二极管外还有保护电路和电流检测电路。
通讯接口的作用主要是观测TCU的工作状态,对检测传感器的故障分析以及传感器资源的共享。
3 TCU控制系统程序框图
TCU控制系统主程序框图如图3所示。程序首先对内部RAM进行分配,然后对各功能模块如Administrator/D转换器、定时器、PWM波形发生器等进行初始化。变速箱的变比在汽车每次时应处于最小变比的位置,因此在每次停车时应将变速箱归位,汽车起动后首先检测各参数,如档位开关、发动机转速、节气门开度、变速箱输入、输出轴转速等。这些参数是控制电磁离合器电流和电动机状态的依据。当需要增加变速箱的变比时,TCU控制电机正转,反之控制电机反转。电磁离合器的控制采用电流增量控制方式。它的控制好坏,直接影响汽车运行的平稳性和经济性。

图3 TCU控制系统主程序框图
4 运行结果
图4和图5为汽车实际运行时电磁离合器电流和变速箱变比的关系曲线。其中图4为汽车速度从零急加速到120KM/H,到120KM/H后松开油门减速到零时的电磁离合器电流与发动机转速、节气门开度和输入轴转速之间的曲线图。由图可以看出节气门急加到最大后保持一段时间,电磁离合器电流同步紧跟着加,当加到峰值时,继续保持不变,发动机转速也加到一个值保持不变,从图中还可看出电磁离合器电流在增加的过程中,不断在抖动,可知在上升过程中电磁离合器在不断在打滑,在此段时间内发动机转速与输入轴转速不成比例,直到电磁离合器到一个稳定的值后才保持一定的比例关系。当节气门全松开后,电磁离合器电流随之下降到一个小值后保持不变,直到车速达到使变速箱处于由齿轮变速为主时,电磁离合器电流继续减小,当车速为零时,电磁离合器电流随之减小到零。由图4可知,当车速在从零加到120KM/H,电磁离合器电流为零,输入轴转速也慢慢减为零。在整个过程中,我们可看到,节气门开度变化率代表了驾驶员的意图,电磁离合器电流主要由节气门开度来决定。电磁离合器的打滑程度决定了发动机转速和输入轴转速的之间的传输比例关系。
注:深蓝—输入轴转速,黄—节气门开度,紫红—发动机转速,浅蓝—电磁离合器电流

图4 电机加速时的电磁离合器电流关系曲线
图5为汽车速度从零加到120KM/H后又由120KM/H减到零时,位置传感器与输入轴转速、输出轴转速和电机电压之间的关系曲线。由图可知,当汽车速度在从零加到120KM/H过程中,位置传感器变比由最大开始下调直到变为最小,此时对应电机反转。当车速由120KM/H开始下降时位置传感器先保持不变,此时电机不转,同时输入轴转速和输出转速成比例的下降,当车速达到一定的值时位置传感器速比由最小开始上调直到为最大值,此时电机反转(因测试时采用的电流传感器为单方向的,所以图中没有反映出反向电流)。输入轴转速和输出轴转速不成比例的下降直至为零。从图5可以看到车速在上升时,位置传感器速比的测试值不断地减小(对应的转速比增大)。反之,车速在下降的过程中,当车速小于某一值时测试值增加。从而实现了变速箱变比的自动调整。
注:黄—位置传感器,深蓝—输入轴转速,紫红—输出轴转速,浅蓝—电机电压

图5 汽车减速时的变速箱变比——转速曲线
通过运行结果可以看出所设计的TCU可以实现电磁离合器转矩和变速箱变比的自动控制。从实际运行感觉看,起动和停止以及加减速过程平稳。并且具有较好的经济性。
1 CVT的基本结构
汽车的无级变速系统主要有以下几种形式:(1)液力机械AT—HMT(Hydrodynamic Mechanical Transmission)广泛应用于轿车、公共汽车、重型车辆、商用车和工程车辆上。(2)机械式AT—AMT(Automa ted Mechanical Transmission)在通常机械式变速器基础上加上微机控制电液伺服操纵自动换档机构组成,目前它应用于部分低档轿车、局部卡车和商用车上。(3)无级式AT—CVT(Continuously Variable Transmission)是目前在小排气量轿车中使用最多的一种。它的主要结构和工作原理如图1所示。
图1 无级式AT—CVT主要结构和工作原理
CVT技术的发展,已经有了一百多年的历史。德国奔驰公司是在汽车上采用CVT技术的鼻祖,早在1886年就将V型橡胶带式CVT安装在该公司生产的汽油机汽车上。但由于结构设计和选材等方面的问题,该传动机构体积过大,传动比过小,无法满足汽车行驶的要求。这些缺点限制了它的应用。直到1979年,通过结构的改进和特殊钢带的使用,CVT的传动比明显提高,具备了在车辆上广泛应用的前提条件。从那时起,福特、菲亚特和日产等公司的车型都曾采用过这种变速传动机构。
CVT采用的V形承推钢带由安装在挠性马氏体时效钢圈上的多片楔形钢片构成。它的动力从主动轮输入,经过V形钢带,由从动轮输出。带轮由可以相对滑动的两部分构成。钢带位于这两部分间的凹槽内。当带轮两部分靠紧时,凹槽较窄,钢带位于带轮外缘,此时带轮的工作直径最大。随着这两部分间的相对滑动,凹槽越来越宽,钢带逐渐靠近带轮中心,即工作直径最小的地方。汽车刚刚起动车速较低时,主动轮工作直径较小,变速器可得到较大的传动比,使汽车获得足够动力克服行驶阻力。随着车速的升高,主动轮工作直径逐渐增大,从动轮工作直径越来越小,变速器传动比也相应减小。由于带轮工作直径可连续变化,因此这种变速器的传动比也是无级、连续变化的,传递动力更平稳,其动力性和经济性远远高于行星齿轮式自动变速器。汽车在实际运行中变速箱变比的控制是由TCU控制直流电动机自动完成的。
2 TCU的基本结构
TCU的基本结构如图2所示,它由单片机、检测电路、驱动电路、电源电路以及通讯电路等部分组成。
图2 TCU的基本结构
单片机是采用美国Microchip公司2002年3月推出的单片PIC18F452,它在功能上可以满足TCU的要求,在性能上它具有低功耗、工作温度范围宽,并且可在较低的电压下正常工作,特别适用于汽车电器。检测电路分为脉冲检测、开关量检测以及模拟量检测。脉冲检测又分为脉冲计数和脉冲宽度检测。如发动转速、输入、输出轴转速的测量是采用脉冲计数方式。节气门开度则是采用脉冲宽度测量的方式。
模拟量的测量主要由滤波电路、放大电路组成。A/D转换是采用单片机内自带的10位A/D转换器。变速箱的变比控制是由直流电动机驱动的。在TCU中是由4支MOSFET组成的H型电路实现对电动机的正反转PWM控制。电磁离合器的电流也是通过MOSFET驱动的。在驱动电路中除主开关元件、续流二极管外还有保护电路和电流检测电路。
通讯接口的作用主要是观测TCU的工作状态,对检测传感器的故障分析以及传感器资源的共享。
3 TCU控制系统程序框图
TCU控制系统主程序框图如图3所示。程序首先对内部RAM进行分配,然后对各功能模块如Administrator/D转换器、定时器、PWM波形发生器等进行初始化。变速箱的变比在汽车每次时应处于最小变比的位置,因此在每次停车时应将变速箱归位,汽车起动后首先检测各参数,如档位开关、发动机转速、节气门开度、变速箱输入、输出轴转速等。这些参数是控制电磁离合器电流和电动机状态的依据。当需要增加变速箱的变比时,TCU控制电机正转,反之控制电机反转。电磁离合器的控制采用电流增量控制方式。它的控制好坏,直接影响汽车运行的平稳性和经济性。
图3 TCU控制系统主程序框图
4 运行结果
图4和图5为汽车实际运行时电磁离合器电流和变速箱变比的关系曲线。其中图4为汽车速度从零急加速到120KM/H,到120KM/H后松开油门减速到零时的电磁离合器电流与发动机转速、节气门开度和输入轴转速之间的曲线图。由图可以看出节气门急加到最大后保持一段时间,电磁离合器电流同步紧跟着加,当加到峰值时,继续保持不变,发动机转速也加到一个值保持不变,从图中还可看出电磁离合器电流在增加的过程中,不断在抖动,可知在上升过程中电磁离合器在不断在打滑,在此段时间内发动机转速与输入轴转速不成比例,直到电磁离合器到一个稳定的值后才保持一定的比例关系。当节气门全松开后,电磁离合器电流随之下降到一个小值后保持不变,直到车速达到使变速箱处于由齿轮变速为主时,电磁离合器电流继续减小,当车速为零时,电磁离合器电流随之减小到零。由图4可知,当车速在从零加到120KM/H,电磁离合器电流为零,输入轴转速也慢慢减为零。在整个过程中,我们可看到,节气门开度变化率代表了驾驶员的意图,电磁离合器电流主要由节气门开度来决定。电磁离合器的打滑程度决定了发动机转速和输入轴转速的之间的传输比例关系。
注:深蓝—输入轴转速,黄—节气门开度,紫红—发动机转速,浅蓝—电磁离合器电流
图4 电机加速时的电磁离合器电流关系曲线
图5为汽车速度从零加到120KM/H后又由120KM/H减到零时,位置传感器与输入轴转速、输出轴转速和电机电压之间的关系曲线。由图可知,当汽车速度在从零加到120KM/H过程中,位置传感器变比由最大开始下调直到变为最小,此时对应电机反转。当车速由120KM/H开始下降时位置传感器先保持不变,此时电机不转,同时输入轴转速和输出转速成比例的下降,当车速达到一定的值时位置传感器速比由最小开始上调直到为最大值,此时电机反转(因测试时采用的电流传感器为单方向的,所以图中没有反映出反向电流)。输入轴转速和输出轴转速不成比例的下降直至为零。从图5可以看到车速在上升时,位置传感器速比的测试值不断地减小(对应的转速比增大)。反之,车速在下降的过程中,当车速小于某一值时测试值增加。从而实现了变速箱变比的自动调整。
注:黄—位置传感器,深蓝—输入轴转速,紫红—输出轴转速,浅蓝—电机电压
图5 汽车减速时的变速箱变比——转速曲线
通过运行结果可以看出所设计的TCU可以实现电磁离合器转矩和变速箱变比的自动控制。从实际运行感觉看,起动和停止以及加减速过程平稳。并且具有较好的经济性。
电力电子 电动机 单片机 电路 Microchip PIC 电压 MOSFET PWM 电流 二极管 传感器 相关文章:
- 混合动力电动汽车中电力电子技术应用综述(11-15)
- 基于单片机和数字信号处理器的汽车发动机点火线圈测试系统(03-12)
- 车辆分层次控制接口系统切换电路及可靠性设计(07-25)
- 多路隔离输出的车载辅助电源设计(07-30)
- 汽车无级变速箱控制器TCU的研究(08-30)
- 基于移相控制的电动汽车用充电机主电路分析研究(09-25)