基于CAN 总线的电动汽车电源管理通信设计
时间:11-29
来源:互联网
点击:
电动汽车的电源管理方案,涉及到了发动机、电动机、蓄电池的工作状况、车辆行驶速度、行驶阻力以及驾驶员的操作等诸多参数,利用CAN总线技术,把以上参数的测控装置连接起来,是实现电动汽车的电源管理的关键步骤,本文主要论述了基于CAN 总线的电动汽车电源管理中的通信系统设计与实现技术。
随着石油价格的上涨以及环保要求的提高,电动已经成为是未来汽车发展的一个重要方向。对于以电池供电的全电动力系统或者以发动机和蓄电池混合动力系统而言,电源管理系统设计是关系车辆性能的一个重要因素,设计时需要考虑综合车辆总体设计方案和外部使用环境,为了节约电源,还需要设计一定的控制策略保证电源的最佳利用。所以很有必要对全电车辆的电源管理系统进行深入探讨。
1,电动汽车能源管理的重要性
电动汽车的电源管理,主要作用在于充分发挥燃料的燃烧效能,使发动机在最佳工况点附近工作,并通过电动机和蓄电池的能量储备与输出,及时调节车辆运行工况和外界路面条件之间的匹配关系。经过十多年的发展,电动汽车的动力系统设计方面,目前最有实用性价值并已有商业化运转的模式,只有混合动力汽车。混合动力系统总成已从原来发动机与电机离散结构向发动机电机和变速箱一体化结构发展,即集成化混合动力总成系统。所以,这里只考虑混合动力系统的电源管理情况。混合动力系统的电源管理,从功能上而言,需要实现如下两个目标:
(1)保证发动机的最佳工况,避免出现发动机的低效工作。通常可将发动机调整在最佳工况点附近稳定运转,通过调整电池和电动机的输出来适应各种外界路况变化。例如,当车辆处于低速、滑行、怠速的工况时,则由电池组驱动电动机,当车辆处启动、加速、爬坡工况时,发动机- 电动机组和电池组共同向电动机提供电能。这样,由于发动机避免了怠速和低速运转从而提高了发动机的效率,不仅减少了废气排放,而且节约了电源。
(2 )充分利用车辆的惯性能量。当车辆减速、制动或者下坡路行驶时,则由车轮的惯性力驱动电动机。这时电动机变成了发电机,可以反向蓄电池充电,节约了燃料。
统计表明在占80%以上的道路条件下,一辆普通轿车仅利用了动力潜能的40%,在市区还会跌至25%,而采用电源优化管理的电动车辆,如丰田的Prius汽车,其动力性已经超过同级车水平,燃油节省75%。
2,电源管理系统的通信需求与CAN 总线技术
电动汽车的电源管理,需要随时监控发动机、电动机、蓄电池的工作状况、车辆行驶速度、行驶阻力数据以及驾驶员的操作情况,并且能够根据上述数据经过智能化处理后自动控制节能装置或者电路工作,所以需要首先解决与能量消耗和能量转换相关的部件运行状态传感器的连接方式。
目前,汽车内部测量与执行部件之间的数据通信主要采用CAN 总线技术,该总线技术最早由德国BOSCH 公司推出,主要用于解决现代汽车中众多的控制与测试仪器之间的数据交换问题。利用CAN 总线开发的电动汽车电源管理系统,不仅通信速率高、准确、可靠性高,而且易于与整车控制网络相兼容,为传感器信号、各个控制单元的计算信息和运行状态的共享以及随车或离车故障诊断等提供了基础平台,所以本课题中,采用CAN 总线作为电源管理的基本通信技术。
3,基于CAN 总线的能源管控系统拓扑结构
电动汽车底盘部分耗能与节能系统连接起来形成的基于CAN 总线的能源管控网络拓扑结构如图1 所示,共包括制动能量转换装置、动力总成、电池管理、电机控制器、行驶阻力测试几个下位关键监测节点和一个由车载计算机系统构成的上位主控节点。
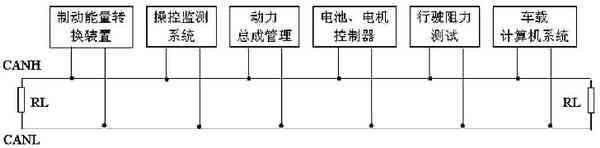
图1 基于CAN 总线的能源管控网络拓扑结构
动能量转换装置与驾驶员的操控监测系统、电池电机控制器共同工作。当驾驶员踩踏制动踏板时,首先制动电机靠近待制动的旋转器件,如传动轴,消耗车辆惯性能量,并转换为电能,同时操控监测系统监测到制动踏板动作时,对电池充电电路进行调整,实现制动电机传递过来的电能的存储。
动力总成系统主要用于实现发动机工况的优化运行。在正常行使的情况下,发动机的能量分为两路,一路传递给车辆传动与推进系统,驱动车辆正常行使,另一路则带动电机工作,向蓄电池供电。此时,电机与电池构成的辅助动力系统相当于一个能量调节装置,通过电池电机控制器和行驶阻力测试装置,根据外界路况的变化,实现发动机两路输出能量的调整和分配。
通过CAN总线,车载计算机系统构成的上位主控节点把整个能源管控网络连接起来,通过专门的软件系统,进行数据采集、数据分析和控制策略的输出,实现外界行驶阻力与发动机能量调整之间的优化匹配,实现车辆内部的能量转换利用,实现电机、电池系统的节能、蓄能和补充能量的调节作用。
4,基于CAN 总线的各监控节点结构和通信流程
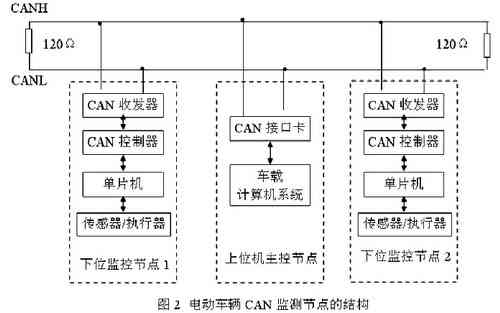
CAN 总线节点结构一般分为两类:一类采用CAN适配卡与PC机相连,实现上位机与CAN总线的通讯;另一类则是由单片机、CAN控制器及CAN驱动器构成,作为一类节点与CAN总线进行数据传输,在本文设计的能源管控系统中,上位主控节点采用了第一类CAN总线节点结构,各个关键监测/控制系统采用了第二类CAN 总线节点结构。各个节点的结构和系统的连接方式如图2 所示。在总线的两端配置了两个120Ω的电阻,其作用是总线匹配阻抗,可以增加总线传输的稳定性和抗干扰能力,减少数据传输中的出错率。
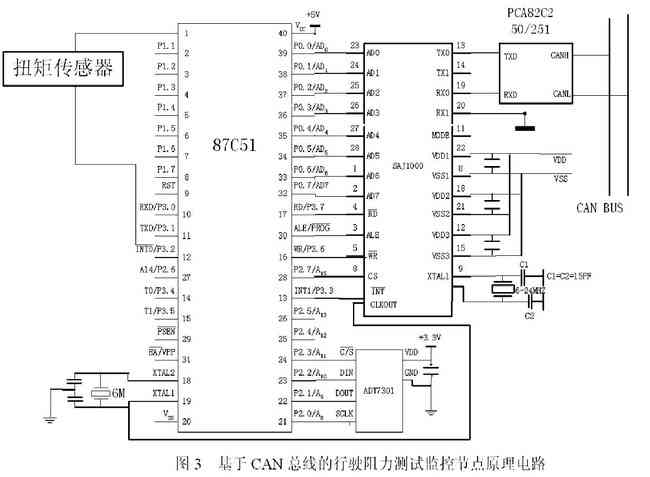
对于各个下位监控节点而言,通常可采用51 系列单片机作为该节点的监测信号初级处理中心装置,而用SJA1000 来做C A N 控制器,PCA82C250 则是一种常用的CAN 收发器和物理总线的接口,主要可以提供对总线的差动发送能力和对CAN 控制器的差动接受能力。采用上述三种元器件构成的一个下位监控节点的电路图形如图3 所示。
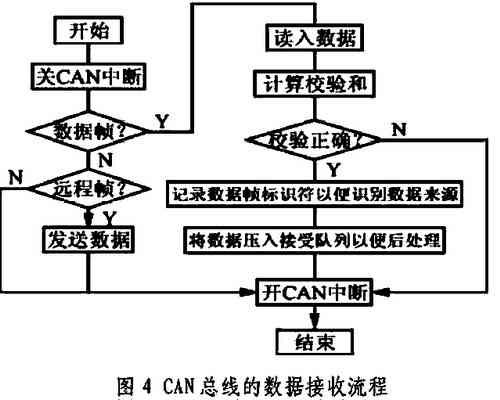
CAN 总线的三层结构模型为:物理层、数据链路层和应用层。其中物理层和数据链路层的功能由SJA1000 完成。SJA1000 在上电硬件复位之后,必须对其进行软件初始化之后才可以进行数据通讯,其主要作用是实现对总线的速率、验收屏蔽码、输出引脚驱动方式、总线模式及时钟分频进行定义。整个能源管控系统通信过程中,各控制器按规定格式和周期发送数据(车速、蓄电池电压、电流和行驶阻力和发动机转速等)到总线上,同时也要接收其它控制器的信息。总线上其它控制器根据需要各取所需的报文。对于接收数据,系统采用中断的方式实现,一旦中断发生,即将接收的数据自动装载到相应的报文寄存器中。此时还可采用屏蔽滤波方式,利用屏蔽滤波寄存器对接收报文的标识符和预先在接收缓冲器初始化时设定的标识符进行有选择地逐位比较,只有标识符匹配的报文才能进入接收缓冲器,那些不符合要求的报文将被屏蔽于接收缓冲器外, 从而减轻CPU 处理报文的负担。上位机利用中断方式接收相关数据的流程如图4 所示。
5,结束语
CAN 总线作为一种可靠的汽车计算机网络总线已开始在汽车上得到应用,使得各汽车计算机控制单元能够通过CAN 总线共享所有的信息和资源,达到简化布线、减少传感器数量、避免控制功能重复、提高系统可靠性和可维护性、降低成本、更好地匹配和协调各个控制系统的目的。本文所设计的基于CAN 总线的电动汽车能源管控系统通信方案,基本能够实现节约能源,优化发动机工作效率的目的,并且技术相对比较成熟,具有高度灵活性、简单的扩展性、优良的抗干扰性和处理错误能力,对于提高汽车的动力性、操作稳定性、安全性都有重要意义。
随着石油价格的上涨以及环保要求的提高,电动已经成为是未来汽车发展的一个重要方向。对于以电池供电的全电动力系统或者以发动机和蓄电池混合动力系统而言,电源管理系统设计是关系车辆性能的一个重要因素,设计时需要考虑综合车辆总体设计方案和外部使用环境,为了节约电源,还需要设计一定的控制策略保证电源的最佳利用。所以很有必要对全电车辆的电源管理系统进行深入探讨。
1,电动汽车能源管理的重要性
电动汽车的电源管理,主要作用在于充分发挥燃料的燃烧效能,使发动机在最佳工况点附近工作,并通过电动机和蓄电池的能量储备与输出,及时调节车辆运行工况和外界路面条件之间的匹配关系。经过十多年的发展,电动汽车的动力系统设计方面,目前最有实用性价值并已有商业化运转的模式,只有混合动力汽车。混合动力系统总成已从原来发动机与电机离散结构向发动机电机和变速箱一体化结构发展,即集成化混合动力总成系统。所以,这里只考虑混合动力系统的电源管理情况。混合动力系统的电源管理,从功能上而言,需要实现如下两个目标:
(1)保证发动机的最佳工况,避免出现发动机的低效工作。通常可将发动机调整在最佳工况点附近稳定运转,通过调整电池和电动机的输出来适应各种外界路况变化。例如,当车辆处于低速、滑行、怠速的工况时,则由电池组驱动电动机,当车辆处启动、加速、爬坡工况时,发动机- 电动机组和电池组共同向电动机提供电能。这样,由于发动机避免了怠速和低速运转从而提高了发动机的效率,不仅减少了废气排放,而且节约了电源。
(2 )充分利用车辆的惯性能量。当车辆减速、制动或者下坡路行驶时,则由车轮的惯性力驱动电动机。这时电动机变成了发电机,可以反向蓄电池充电,节约了燃料。
统计表明在占80%以上的道路条件下,一辆普通轿车仅利用了动力潜能的40%,在市区还会跌至25%,而采用电源优化管理的电动车辆,如丰田的Prius汽车,其动力性已经超过同级车水平,燃油节省75%。
2,电源管理系统的通信需求与CAN 总线技术
电动汽车的电源管理,需要随时监控发动机、电动机、蓄电池的工作状况、车辆行驶速度、行驶阻力数据以及驾驶员的操作情况,并且能够根据上述数据经过智能化处理后自动控制节能装置或者电路工作,所以需要首先解决与能量消耗和能量转换相关的部件运行状态传感器的连接方式。
目前,汽车内部测量与执行部件之间的数据通信主要采用CAN 总线技术,该总线技术最早由德国BOSCH 公司推出,主要用于解决现代汽车中众多的控制与测试仪器之间的数据交换问题。利用CAN 总线开发的电动汽车电源管理系统,不仅通信速率高、准确、可靠性高,而且易于与整车控制网络相兼容,为传感器信号、各个控制单元的计算信息和运行状态的共享以及随车或离车故障诊断等提供了基础平台,所以本课题中,采用CAN 总线作为电源管理的基本通信技术。
3,基于CAN 总线的能源管控系统拓扑结构
电动汽车底盘部分耗能与节能系统连接起来形成的基于CAN 总线的能源管控网络拓扑结构如图1 所示,共包括制动能量转换装置、动力总成、电池管理、电机控制器、行驶阻力测试几个下位关键监测节点和一个由车载计算机系统构成的上位主控节点。
图1 基于CAN 总线的能源管控网络拓扑结构
动能量转换装置与驾驶员的操控监测系统、电池电机控制器共同工作。当驾驶员踩踏制动踏板时,首先制动电机靠近待制动的旋转器件,如传动轴,消耗车辆惯性能量,并转换为电能,同时操控监测系统监测到制动踏板动作时,对电池充电电路进行调整,实现制动电机传递过来的电能的存储。
动力总成系统主要用于实现发动机工况的优化运行。在正常行使的情况下,发动机的能量分为两路,一路传递给车辆传动与推进系统,驱动车辆正常行使,另一路则带动电机工作,向蓄电池供电。此时,电机与电池构成的辅助动力系统相当于一个能量调节装置,通过电池电机控制器和行驶阻力测试装置,根据外界路况的变化,实现发动机两路输出能量的调整和分配。
通过CAN总线,车载计算机系统构成的上位主控节点把整个能源管控网络连接起来,通过专门的软件系统,进行数据采集、数据分析和控制策略的输出,实现外界行驶阻力与发动机能量调整之间的优化匹配,实现车辆内部的能量转换利用,实现电机、电池系统的节能、蓄能和补充能量的调节作用。
4,基于CAN 总线的各监控节点结构和通信流程
CAN 总线节点结构一般分为两类:一类采用CAN适配卡与PC机相连,实现上位机与CAN总线的通讯;另一类则是由单片机、CAN控制器及CAN驱动器构成,作为一类节点与CAN总线进行数据传输,在本文设计的能源管控系统中,上位主控节点采用了第一类CAN总线节点结构,各个关键监测/控制系统采用了第二类CAN 总线节点结构。各个节点的结构和系统的连接方式如图2 所示。在总线的两端配置了两个120Ω的电阻,其作用是总线匹配阻抗,可以增加总线传输的稳定性和抗干扰能力,减少数据传输中的出错率。
对于各个下位监控节点而言,通常可采用51 系列单片机作为该节点的监测信号初级处理中心装置,而用SJA1000 来做C A N 控制器,PCA82C250 则是一种常用的CAN 收发器和物理总线的接口,主要可以提供对总线的差动发送能力和对CAN 控制器的差动接受能力。采用上述三种元器件构成的一个下位监控节点的电路图形如图3 所示。
CAN 总线的三层结构模型为:物理层、数据链路层和应用层。其中物理层和数据链路层的功能由SJA1000 完成。SJA1000 在上电硬件复位之后,必须对其进行软件初始化之后才可以进行数据通讯,其主要作用是实现对总线的速率、验收屏蔽码、输出引脚驱动方式、总线模式及时钟分频进行定义。整个能源管控系统通信过程中,各控制器按规定格式和周期发送数据(车速、蓄电池电压、电流和行驶阻力和发动机转速等)到总线上,同时也要接收其它控制器的信息。总线上其它控制器根据需要各取所需的报文。对于接收数据,系统采用中断的方式实现,一旦中断发生,即将接收的数据自动装载到相应的报文寄存器中。此时还可采用屏蔽滤波方式,利用屏蔽滤波寄存器对接收报文的标识符和预先在接收缓冲器初始化时设定的标识符进行有选择地逐位比较,只有标识符匹配的报文才能进入接收缓冲器,那些不符合要求的报文将被屏蔽于接收缓冲器外, 从而减轻CPU 处理报文的负担。上位机利用中断方式接收相关数据的流程如图4 所示。
5,结束语
CAN 总线作为一种可靠的汽车计算机网络总线已开始在汽车上得到应用,使得各汽车计算机控制单元能够通过CAN 总线共享所有的信息和资源,达到简化布线、减少传感器数量、避免控制功能重复、提高系统可靠性和可维护性、降低成本、更好地匹配和协调各个控制系统的目的。本文所设计的基于CAN 总线的电动汽车能源管控系统通信方案,基本能够实现节约能源,优化发动机工作效率的目的,并且技术相对比较成熟,具有高度灵活性、简单的扩展性、优良的抗干扰性和处理错误能力,对于提高汽车的动力性、操作稳定性、安全性都有重要意义。
电动汽车 电源管理 电动机 总线 电路 传感器 CAN总线 单片机 电阻 收发器 电路图 电压 电流 相关文章:
- 电动汽车:颠覆性的快速充电与非接触充电技术(09-20)
- 电动汽车的基本概述及重要组成(10-28)
- 矢量控制变频器在混合动力电动汽车中的应用(01-27)
- 基于CAN总线的电动汽车控制系统设计(05-25)
- 电动汽车驱动系统中的超级电容原理(05-21)
- 动力电池管理系统硬件设计技术(05-30)