电子控制ABS系统的非线性理论分析
时间:09-25
来源:互联网
点击:
在驾驶员、汽车和环境三者组成的系统中,汽车和环境之间的最基本的联系是轮胎与地面之间的作用力。由于汽车行驶状态主要是由轮胎与地面之间的纵向作用力和横向作用力决定的,因此车轮与地面之间的作用力必然要受到轮胎与路面之间附着力的限制。abs系统可最大限度地利用轮胎与路面之间的纵向和横向附着系数,从而在制动过程中增强汽车的稳定性,防止侧滑和摆尾,同时在紧急制动过程中保持转向操作的稳定性能,有效利用纵向附着力可以缩短汽车制动距离,减轻轮胎磨损。随机电子控制abs系统可根据其所处的状态将车轮的运动状态与路面的附着联系进行及时的、准确的控制,适应了汽车制动系统日益发展的需要,是国际abs的主流。
由于汽车行驶时轮胎与地面之间的纵向作用力和横向作用力是非线性的,依旧存在一定的缺陷,通过研究abs系统制动力的非线性变化,提出改进对策。
1 电子控制abs的工作原理
汽车制动时由于车轮速度v1与汽车速度v2 之间存在的差异。当汽车正常运行时,v1≥v2;当汽车制动时,v1≤v2 ; ;因而会导致汽车轮胎 与地面之间产生滑移。如图1所示,道路附着系数与车轮滑移关系曲线可以看出:
滑移率当车轮以纯滚动方式与路面接触时,其中s=0,为纯滚动状态。当汽车车轮速度为汽车速度80%时,s=20%,为连滚带滑状态,此时车轮具有最大的纵向附着力和较高的侧向附着力;当车轮抱死并转速为0时,s=100%时,其侧向附着力最小,只要很小的侧向力干扰,汽车便能产生侧滑。风力干扰、制动不均、路面倾斜等,都会使汽车产生侧滑。侧滑在行驶安全中最危险,最易产生交通事故,所以汽车行驶时,首先必需防止制动抱死。
研究表明:当滑移率8%≤s≤35%时,能传递最大制动力。制动防抱死的基本原理就是依据上述的研究结论,通过控制调节制动力,使制动过程中车轮滑移率在合适的范围内,以取得最佳的制动效果。
2 电子控制abs的系统结构
abs系统通常由传感器、控制器和调节器三部分组成,并通过线路连接成一个有机体,形成一个以滑移率为目标的自动控制系统。按照传感器、控制器和调节器的配置和控制方式不同可组成不同的abs系统。而不同的系统具有各自的成本和性能。
如图2是对角车轮独立调节控制的abs系统,它由两套传感器、一个两通道控制器和两个调节器组成,前轴传感器布置在右前轮,后轴传感器布置在左后轮,控制器布置在驾驶区仪表盘上,调节器分别连接到前、后制动管路中。
传感器:由一个永磁式传感器和激磁环组成,传感器一般固定在车轴或制动底板上,激磁环则固定在轮毂上,它们以非接触式将车轮传动的脉冲信号连续不断的传给控制器。
控制器:监测、处理传感器输送来的信号,将其信号处理成车轮的速度、减速度、加速度和滑移率,并按照预先设定的减速度、加速度和滑移率的门限值,将指令发给连接在制动管路上的调节器,从而实施加气、保持和放气功能,调节管路的压力,以满足多个车轮在不同路面状态下的最大制动的要求。
调节器:是abs的执行部分,它负责调节压力,以满足多个车轮在不同路面状态下的最大制动力的要求。
3 电子控制abs系统通道结构
abs系统的通道是指连接压力调节器与制动器的独立液压回路,按其数量可分为双通道、三通道、四通道和六通道结构。双通道结构有两个传感器,可独立进行调整。两个后轮装有一个传感器,共用一个通道,其缺点是当其中一后轮要抱死时,另一个要一同调整。较为理想的是各个轮子都装有传感器,有自己的通道,都可以独立调整。如二轴四轮汽车使用四通道结构abs系统,三轴六轮汽车使用六通道结构abs系统,确保最短的制动距离和最佳的方向稳定性。
4 电子控制abs系统的非线性分析
根据图1附着系数ф 与滑移率s的非线性关系可知:
纵向附着力系数
f纵=-k纵(s-0.2)2+0.825 (s≤20%)---------------------(1)
f纵=k纵(s—0.95)2+0.725 (s≥20%)----------------------(2)
k纵=0.17778
横向附着力系数
f横=—k横s+ 0.73 -----------------(3)
k横=0.73
从上述纵、横向附着力的表达式可以看出:纵向附着力系数为s的非线性函数,横向附着力系数为s的线性函数。研究上述两函数,找出s为何值时,f纵和f横的谐调值最大,从而利用s来控制f,以达到最佳制动效果。”
5 电子控制abs系统改进对策
目前,传统电子控制abs的系统存在的问题:
(1) 采用共用通道时,当其中一轮要抱死时,另一个对称轮也要一同调整。
(2)由于通道内的液体压力受空气压缩泵的加气状态的影响,具有时变性和不确定性等特点,因此会出现有时防抱死系统效果不佳和系统失灵的情况。
(3)由于通道内的液体传递采用改变气压传递方法,在传递的过程中由于要进行加气、保持和放气等过程,反应速度较慢。
根据传统电子控制abs系统存在的上述三个问题,采取相应的改进对策:
(1) 采用独立通道,当其中一轮要 抱死时,另一个对称轮不受影响。同时,这样做可以减少通道长度,提高反应速度。
(2) 要解决由于通道内的液体压力(制动气室的气压)受空气压缩泵的加气状态的影响,导致其具有时变性和不确定性等特点;采用电路替换通道,以提高传递速度和可靠性,克服时变性和不确定性等因素造成的缺陷。
(3) 要彻底解决传统电子控制abs系统存在的问题,就要采用全电子自动控制abs系统。将气压制动改成电磁制动,以滑移率s为变量,经传感器将滑移率s变为电磁信号,经过单片机(可采用intel公司8798单片机)处理,传递给电磁制动刹车器件,这样不仅提高了传递速度,同时也提高了可靠性系数。可确保汽车有最短的制动距离和最佳的方向稳定性。图3为全电子自动控制abs的系统方框图。
全电子自动控制abs系统的工程原理:由于采用电磁制动系统,当紧急刹车时,自动进入全电子自动控制abs的系统,这时s为自变量,传感器将此信号传递给单片机经处理后,控制电磁制动(电磁刹),如果电磁制动过急,则电磁刹将此信号反馈给传感器进行自动控制状态调整。
由于汽车行驶时轮胎与地面之间的纵向作用力和横向作用力是非线性的,依旧存在一定的缺陷,通过研究abs系统制动力的非线性变化,提出改进对策。
1 电子控制abs的工作原理
汽车制动时由于车轮速度v1与汽车速度v2 之间存在的差异。当汽车正常运行时,v1≥v2;当汽车制动时,v1≤v2 ; ;因而会导致汽车轮胎 与地面之间产生滑移。如图1所示,道路附着系数与车轮滑移关系曲线可以看出:
滑移率当车轮以纯滚动方式与路面接触时,其中s=0,为纯滚动状态。当汽车车轮速度为汽车速度80%时,s=20%,为连滚带滑状态,此时车轮具有最大的纵向附着力和较高的侧向附着力;当车轮抱死并转速为0时,s=100%时,其侧向附着力最小,只要很小的侧向力干扰,汽车便能产生侧滑。风力干扰、制动不均、路面倾斜等,都会使汽车产生侧滑。侧滑在行驶安全中最危险,最易产生交通事故,所以汽车行驶时,首先必需防止制动抱死。
研究表明:当滑移率8%≤s≤35%时,能传递最大制动力。制动防抱死的基本原理就是依据上述的研究结论,通过控制调节制动力,使制动过程中车轮滑移率在合适的范围内,以取得最佳的制动效果。
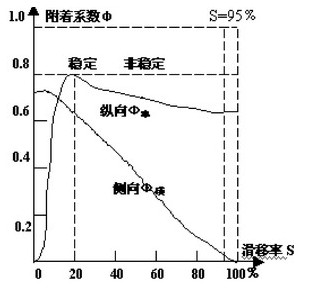
图 1 附着系数f与滑移率s的非线性关系曲线。
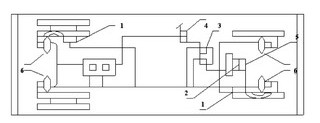
图 2 对角车轮独立调节控制的fkx-ac型abs
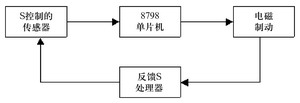
图3 全电子自动控制abs的系统方框图
2 电子控制abs的系统结构
abs系统通常由传感器、控制器和调节器三部分组成,并通过线路连接成一个有机体,形成一个以滑移率为目标的自动控制系统。按照传感器、控制器和调节器的配置和控制方式不同可组成不同的abs系统。而不同的系统具有各自的成本和性能。
如图2是对角车轮独立调节控制的abs系统,它由两套传感器、一个两通道控制器和两个调节器组成,前轴传感器布置在右前轮,后轴传感器布置在左后轮,控制器布置在驾驶区仪表盘上,调节器分别连接到前、后制动管路中。
传感器:由一个永磁式传感器和激磁环组成,传感器一般固定在车轴或制动底板上,激磁环则固定在轮毂上,它们以非接触式将车轮传动的脉冲信号连续不断的传给控制器。
控制器:监测、处理传感器输送来的信号,将其信号处理成车轮的速度、减速度、加速度和滑移率,并按照预先设定的减速度、加速度和滑移率的门限值,将指令发给连接在制动管路上的调节器,从而实施加气、保持和放气功能,调节管路的压力,以满足多个车轮在不同路面状态下的最大制动的要求。
调节器:是abs的执行部分,它负责调节压力,以满足多个车轮在不同路面状态下的最大制动力的要求。
3 电子控制abs系统通道结构
abs系统的通道是指连接压力调节器与制动器的独立液压回路,按其数量可分为双通道、三通道、四通道和六通道结构。双通道结构有两个传感器,可独立进行调整。两个后轮装有一个传感器,共用一个通道,其缺点是当其中一后轮要抱死时,另一个要一同调整。较为理想的是各个轮子都装有传感器,有自己的通道,都可以独立调整。如二轴四轮汽车使用四通道结构abs系统,三轴六轮汽车使用六通道结构abs系统,确保最短的制动距离和最佳的方向稳定性。
4 电子控制abs系统的非线性分析
根据图1附着系数ф 与滑移率s的非线性关系可知:
纵向附着力系数
f纵=-k纵(s-0.2)2+0.825 (s≤20%)---------------------(1)
f纵=k纵(s—0.95)2+0.725 (s≥20%)----------------------(2)
k纵=0.17778
横向附着力系数
f横=—k横s+ 0.73 -----------------(3)
k横=0.73
从上述纵、横向附着力的表达式可以看出:纵向附着力系数为s的非线性函数,横向附着力系数为s的线性函数。研究上述两函数,找出s为何值时,f纵和f横的谐调值最大,从而利用s来控制f,以达到最佳制动效果。”
5 电子控制abs系统改进对策
目前,传统电子控制abs的系统存在的问题:
(1) 采用共用通道时,当其中一轮要抱死时,另一个对称轮也要一同调整。
(2)由于通道内的液体压力受空气压缩泵的加气状态的影响,具有时变性和不确定性等特点,因此会出现有时防抱死系统效果不佳和系统失灵的情况。
(3)由于通道内的液体传递采用改变气压传递方法,在传递的过程中由于要进行加气、保持和放气等过程,反应速度较慢。
根据传统电子控制abs系统存在的上述三个问题,采取相应的改进对策:
(1) 采用独立通道,当其中一轮要 抱死时,另一个对称轮不受影响。同时,这样做可以减少通道长度,提高反应速度。
(2) 要解决由于通道内的液体压力(制动气室的气压)受空气压缩泵的加气状态的影响,导致其具有时变性和不确定性等特点;采用电路替换通道,以提高传递速度和可靠性,克服时变性和不确定性等因素造成的缺陷。
(3) 要彻底解决传统电子控制abs系统存在的问题,就要采用全电子自动控制abs系统。将气压制动改成电磁制动,以滑移率s为变量,经传感器将滑移率s变为电磁信号,经过单片机(可采用intel公司8798单片机)处理,传递给电磁制动刹车器件,这样不仅提高了传递速度,同时也提高了可靠性系数。可确保汽车有最短的制动距离和最佳的方向稳定性。图3为全电子自动控制abs的系统方框图。
全电子自动控制abs系统的工程原理:由于采用电磁制动系统,当紧急刹车时,自动进入全电子自动控制abs的系统,这时s为自变量,传感器将此信号传递给单片机经处理后,控制电磁制动(电磁刹),如果电磁制动过急,则电磁刹将此信号反馈给传感器进行自动控制状态调整。
- 电子技术的革新先锋(11-21)
- ispMACH4000Z CPLD在消费类电子产品中的应用(01-24)
- 现代汽车电子技术综述(06-24)
- 新技术、新应用让传感器深入汽车电子设备的各个角落(05-11)
- RFID技术在商用汽车生产及使用中的应用(05-11)
- 模糊控制在汽车离合器中的应用(05-11)