汽油/CNG两用燃料发动机ECU在环仿真
时间:05-11
来源:互联网
点击:
系统硬件环境的构建
基于PXI的ECU快速原型系统硬件
本实验系统连接图如图3(a)所示。例如,PXI系统为ECU快速原型中AI MOD1/TC0 提供热电偶温度(发动机水温、油温、环境温度等)和采集AO MOD3/AO0 转速信号。
ECU快速原型由CompactRIO系统构建并且使用NI RIO技术,可以利用FPGA芯片和LabVIEW来定制测量硬件电路,可利用可重新配置的FPGA技术来自动合成高度优化的电路,从而实现输入/输出,通信和控制应用。把发动机的ECU模型编译成动态链接库文件后再下载到CompactRIO的FPGA,CompactRIO则为一台虚拟ECU。
基于PXI的真实ECU在环仿真系统硬件
基于PXI的真实ECU的仿真实验硬件连接如图3(b)所示。由PXI 6602输出高速可调脉冲作为ECU的曲轴脉冲和凸轮轴脉冲输入,ECU经过优化策略的计算输出点火脉宽信号和喷油脉宽信号,由PXI 6259来采集,通过LabVIEW界面的显示控件把波形显示出来,以便判断该目标硬件是否达到要求。
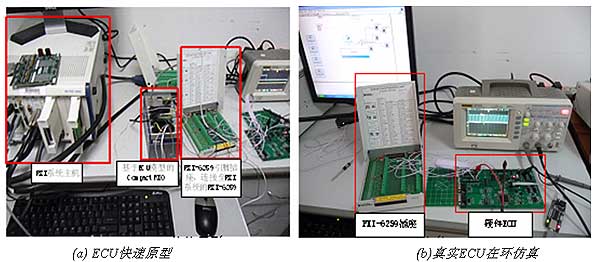
图3 基于PXI的ECU在环仿真系统硬件连接
系统软件环境的构建
基于PXI的ECU的快速原型系统软件设计
给ECU快速原型搭建仿真环境,在CompactRIO的AI口接上PXI数据采集卡的输出端,提供节气门开度值、点火提前角等仿真信号;再给AO口接上 PXI的输入端,使用LabVIEW设计的软件界面,使用控制制件调节输出电压,在显示控件上观察CompactRIO的输出波形。如图4所示为基于 PXI的ECU快速原型系统的软件界面。

图4 基于PXI的虚拟ECU仿真系统
在整个快速原型的实现和实验中,LabVIEW Real-Time模块是用于LabVIEW开发系统的附加组件。该软件为特定的实时目标编译和优化LabVIEW 图形化代码;借助NI LabVIEW FPGA和可重新配置I/O (RIO)硬件,可创建自定义的I/O和控制硬件,而无需预先了解传统的HDL语言或硬件板卡设计。
ECU快速原型流程如下:
1)用Matlab Simulink生成ECU模型的DLL文件,以便编译进CompactRIO。
2)用LabVIEW生成CompactRIO的lvbit文件,对CompactRIO的I/O口进行初始化。
3)连通LabVIEW及CompactRIO,并把ECU模型的DLL下载到CompactRIO中。
4)在SIT管理器中调用CompactRIO的lvbit文件,并设置好与模型相关的输入输出口。
5)用函数发生器对CompactRIO的AI口进行输入,并用示波器观察CompactRIO的输出口。
6)用PXI系统和示波器、电压表对CompactRIO的AI口输入及测试AO口输出,记录波形和数据。
基于PXI的真实ECU在环仿真系统软件设计
使用LabVIEW的DAQ助手和仿真信号模块创建模拟信号输入输出程序。采样设置设为连续采样,采样数为15000,采样率10kHz。仿真节气门开度的电压信号,选用直流输出。
实验与分析
基于PXI的ECU快速原型测试
按照PXI与虚拟ECU的连接方法连好硬件,点火提前角设为15°,节气门开度为7°,设定转速为4500 r/min,点击RUN开始测试。扭矩、曲轴转速变化如图5(a)(b)所示。点击保存数据即可保存CSV格式的数据。
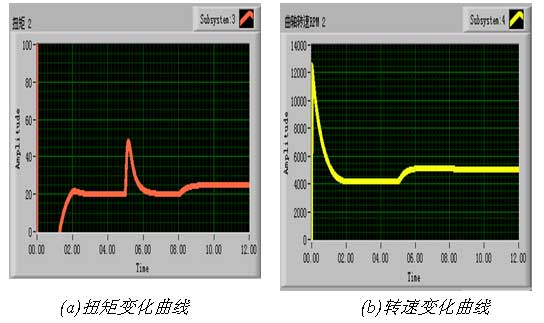
图5 虚拟ECU的输出信号图
基于PXI的真实ECU在环测试
曲轴转速设为1000 r/min时点击RUN开始运行,如图6分别显示了硬件ECU输出的1-4缸点火信号、2-3缸点火信号、1缸喷油和2缸喷油信号。

图6 真实ECU喷油和点火信
硬件在环仿真系统的应用反映了以下特点:
1)系统用户界面友好、直观易用,可自定义界面。
2)PXI系统满足ECU开发准确度要求,可以重复配置,扩展模块方便,适合ECU的低风险、低成本、短周期开发。
3)测试数据可存取为CSV格式,方便后续数据处理。
进行了实验误差分析,系统相对误差<3.9 %,满足ECU测试的要求。最后,进行了基于PXI的ECU快速原型和基于PXI的真实ECU在环测试。
瞬态试验
基于PXI的CompactRIO 虚拟ECU标定系统在转速n为5000 r/min,节气门开度Throttle为17 ,Pm为43 kPa,点火提前角θ为9°下的输出信号波形,包括曲轴转速n、进气压力Pm、喷油量信号Mass Fuel、氧传感器O2、扭矩T、HC排放、CO排放、NOx排放、空燃比AFR和功率PO。当Simulink中的ECU模型编译到 CompactRIO虚拟ECU上运行,由PXI系统对ECU快速原型提供所需要的输入信号及测试其输出信号,输出信号波形及数据由LabVIEW的示波器模块及数据保存模块所得到。
以转速n为5000 r.min-1,Pm为43 kPa,点火提前角θ为9°下为例,Simulink系统仿真结果输出波形与虚拟ECU标定系统实际输出的波形相似,误差较小。图7为参数转速的比较图,其中图7(a)为Simulink输出,图7(b)为虚拟ECU输出。
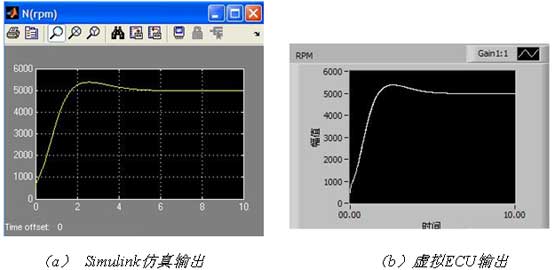
图7 曲轴转速波形比较
稳态测试数据分析与讨论
表1为发动机转速为5000 r.min-1,进气压力Pm为39 kPa的稳态工况数据(以参数转速为例),进行10种点火提前角下的标定,然后与Simulink 软件在环仿真数据比较的误差分析。
在发动机转速为5000 r.min-1,进气压力Pm分别为39 kPa、43 kPa、48 kPa和54 kPa下的稳态工况,进行10种点火提前角下的标定,得到点火提前角的MAP图,以Simulink系统仿真结果为基准,各参数相对误差平均<0.5%。
表1是10个参数误差绝对值之和的平均A和相对误差平均B的综合分析。
表2 Simulink仿真与虚拟ECU标定系统测试误差平均分析总表
基于PXI的ECU快速原型系统硬件
本实验系统连接图如图3(a)所示。例如,PXI系统为ECU快速原型中AI MOD1/TC0 提供热电偶温度(发动机水温、油温、环境温度等)和采集AO MOD3/AO0 转速信号。
ECU快速原型由CompactRIO系统构建并且使用NI RIO技术,可以利用FPGA芯片和LabVIEW来定制测量硬件电路,可利用可重新配置的FPGA技术来自动合成高度优化的电路,从而实现输入/输出,通信和控制应用。把发动机的ECU模型编译成动态链接库文件后再下载到CompactRIO的FPGA,CompactRIO则为一台虚拟ECU。
基于PXI的真实ECU在环仿真系统硬件
基于PXI的真实ECU的仿真实验硬件连接如图3(b)所示。由PXI 6602输出高速可调脉冲作为ECU的曲轴脉冲和凸轮轴脉冲输入,ECU经过优化策略的计算输出点火脉宽信号和喷油脉宽信号,由PXI 6259来采集,通过LabVIEW界面的显示控件把波形显示出来,以便判断该目标硬件是否达到要求。
图3 基于PXI的ECU在环仿真系统硬件连接
系统软件环境的构建
基于PXI的ECU的快速原型系统软件设计
给ECU快速原型搭建仿真环境,在CompactRIO的AI口接上PXI数据采集卡的输出端,提供节气门开度值、点火提前角等仿真信号;再给AO口接上 PXI的输入端,使用LabVIEW设计的软件界面,使用控制制件调节输出电压,在显示控件上观察CompactRIO的输出波形。如图4所示为基于 PXI的ECU快速原型系统的软件界面。
图4 基于PXI的虚拟ECU仿真系统
在整个快速原型的实现和实验中,LabVIEW Real-Time模块是用于LabVIEW开发系统的附加组件。该软件为特定的实时目标编译和优化LabVIEW 图形化代码;借助NI LabVIEW FPGA和可重新配置I/O (RIO)硬件,可创建自定义的I/O和控制硬件,而无需预先了解传统的HDL语言或硬件板卡设计。
ECU快速原型流程如下:
1)用Matlab Simulink生成ECU模型的DLL文件,以便编译进CompactRIO。
2)用LabVIEW生成CompactRIO的lvbit文件,对CompactRIO的I/O口进行初始化。
3)连通LabVIEW及CompactRIO,并把ECU模型的DLL下载到CompactRIO中。
4)在SIT管理器中调用CompactRIO的lvbit文件,并设置好与模型相关的输入输出口。
5)用函数发生器对CompactRIO的AI口进行输入,并用示波器观察CompactRIO的输出口。
6)用PXI系统和示波器、电压表对CompactRIO的AI口输入及测试AO口输出,记录波形和数据。
基于PXI的真实ECU在环仿真系统软件设计
使用LabVIEW的DAQ助手和仿真信号模块创建模拟信号输入输出程序。采样设置设为连续采样,采样数为15000,采样率10kHz。仿真节气门开度的电压信号,选用直流输出。
实验与分析
基于PXI的ECU快速原型测试
按照PXI与虚拟ECU的连接方法连好硬件,点火提前角设为15°,节气门开度为7°,设定转速为4500 r/min,点击RUN开始测试。扭矩、曲轴转速变化如图5(a)(b)所示。点击保存数据即可保存CSV格式的数据。
图5 虚拟ECU的输出信号图
基于PXI的真实ECU在环测试
曲轴转速设为1000 r/min时点击RUN开始运行,如图6分别显示了硬件ECU输出的1-4缸点火信号、2-3缸点火信号、1缸喷油和2缸喷油信号。
图6 真实ECU喷油和点火信
硬件在环仿真系统的应用反映了以下特点:
1)系统用户界面友好、直观易用,可自定义界面。
2)PXI系统满足ECU开发准确度要求,可以重复配置,扩展模块方便,适合ECU的低风险、低成本、短周期开发。
3)测试数据可存取为CSV格式,方便后续数据处理。
进行了实验误差分析,系统相对误差<3.9 %,满足ECU测试的要求。最后,进行了基于PXI的ECU快速原型和基于PXI的真实ECU在环测试。
瞬态试验
基于PXI的CompactRIO 虚拟ECU标定系统在转速n为5000 r/min,节气门开度Throttle为17 ,Pm为43 kPa,点火提前角θ为9°下的输出信号波形,包括曲轴转速n、进气压力Pm、喷油量信号Mass Fuel、氧传感器O2、扭矩T、HC排放、CO排放、NOx排放、空燃比AFR和功率PO。当Simulink中的ECU模型编译到 CompactRIO虚拟ECU上运行,由PXI系统对ECU快速原型提供所需要的输入信号及测试其输出信号,输出信号波形及数据由LabVIEW的示波器模块及数据保存模块所得到。
以转速n为5000 r.min-1,Pm为43 kPa,点火提前角θ为9°下为例,Simulink系统仿真结果输出波形与虚拟ECU标定系统实际输出的波形相似,误差较小。图7为参数转速的比较图,其中图7(a)为Simulink输出,图7(b)为虚拟ECU输出。
图7 曲轴转速波形比较
稳态测试数据分析与讨论
表1为发动机转速为5000 r.min-1,进气压力Pm为39 kPa的稳态工况数据(以参数转速为例),进行10种点火提前角下的标定,然后与Simulink 软件在环仿真数据比较的误差分析。
在发动机转速为5000 r.min-1,进气压力Pm分别为39 kPa、43 kPa、48 kPa和54 kPa下的稳态工况,进行10种点火提前角下的标定,得到点火提前角的MAP图,以Simulink系统仿真结果为基准,各参数相对误差平均<0.5%。
表1是10个参数误差绝对值之和的平均A和相对误差平均B的综合分析。
表2 Simulink仿真与虚拟ECU标定系统测试误差平均分析总表
仿真 LabVIEW PXI 快速原型 FPGA 嵌入式 电压 PWM 示波器 传感器 温度传感器 电路 虚拟仪器 相关文章:
- 车辆导航定位仿真试验系统研究(05-26)
- 柴油发电机组转速控制半物理仿真(01-08)
- dSPACE实时仿真系统介绍(05-11)
- 基于DSP的汽车内噪声主动控制系统的设计(06-09)
- Multisim仿真软件在发动机电控设计中的应用(06-29)
- 仿真技术驱动混合动力车和电动汽车设计(01-05)