永磁同步电机逆变器死区补偿技术
时间:12-04
来源:互联网
点击:
基于位置的动态死区补偿方法
各种死区补偿方法的一个共同特点是根据电流波形补偿电压信号。因此需要检测实际电流值,判断各相电流正负,以其过零点作为补偿电压信号的切换时刻。电流检测环节由电流传感器、低通滤波器和a/d转换组成,为减小噪声程序中还需加数字滤波。检测到的电流存在器件精度和干扰造成的误差,且有相位延迟。因此利用实际检测到的电流信号很难精确补偿死区影响,甚至会由于过零点附近的错误补偿造成更大的电流畸变。
现今pmsm的转矩控制多是通过矢量控制实现的,为准确控制电机电流,其电流环响应频率很高,可达到1khz以上,实际电流能够精确跟踪电流指令信号。在高精度的交流伺服系统中,为实现高精度的位置伺服控制需要高分辨率的位置传感器,一般达到16或17位,而高速高精度a/d器件相对成本较高,其分辨率一般为10或12位。由于电流矢量和转子位置相关,如果用位置信号判断电流正负,施加电压死区补偿信号,补偿的精度可以比实际使用的电流信号精度高,且不受干扰信号的影响。
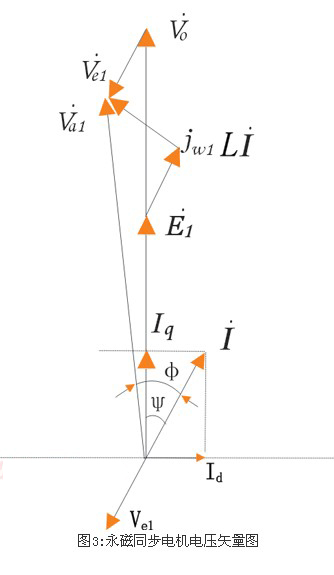
磁极的位置角度与电流的相位关系固定,经过分析,我们按如下的位置变化规律进行电压补偿:
·当角度0《θ《π时,ia》0,a相补偿正向电压;反之补偿反向电压。
·当角度2π/3《θ《5π/3时, ib》0,b相补偿正向电压;反之补偿反向电压。
·当角度-2π/3《θ《π/3时, ic》0,c相补偿正向电压;反之补偿反向电压。
补偿电压的幅值计算公式为:

其中factor为调整系数,一般取为0.7。
有平的台阶。而加入以上提出的死区补偿方法后,图5所示实际电流跟踪给定电流,得到了效果很好的正弦波形。
逆变器的开关死区效应对交流伺服系统的性能具有较大的影响,因此对开关死区进行校正补偿是必要的。本文在分析了各种死区补偿方法的基础上,提出了一种基于位置检测信号的动态补偿方法。该方法利用高分辨率的编码器来提高电流方向的判断精度,实验证明具有较好的补偿效果。(电子工程网)
各种死区补偿方法的一个共同特点是根据电流波形补偿电压信号。因此需要检测实际电流值,判断各相电流正负,以其过零点作为补偿电压信号的切换时刻。电流检测环节由电流传感器、低通滤波器和a/d转换组成,为减小噪声程序中还需加数字滤波。检测到的电流存在器件精度和干扰造成的误差,且有相位延迟。因此利用实际检测到的电流信号很难精确补偿死区影响,甚至会由于过零点附近的错误补偿造成更大的电流畸变。
现今pmsm的转矩控制多是通过矢量控制实现的,为准确控制电机电流,其电流环响应频率很高,可达到1khz以上,实际电流能够精确跟踪电流指令信号。在高精度的交流伺服系统中,为实现高精度的位置伺服控制需要高分辨率的位置传感器,一般达到16或17位,而高速高精度a/d器件相对成本较高,其分辨率一般为10或12位。由于电流矢量和转子位置相关,如果用位置信号判断电流正负,施加电压死区补偿信号,补偿的精度可以比实际使用的电流信号精度高,且不受干扰信号的影响。
磁极的位置角度与电流的相位关系固定,经过分析,我们按如下的位置变化规律进行电压补偿:
·当角度0《θ《π时,ia》0,a相补偿正向电压;反之补偿反向电压。
·当角度2π/3《θ《5π/3时, ib》0,b相补偿正向电压;反之补偿反向电压。
·当角度-2π/3《θ《π/3时, ic》0,c相补偿正向电压;反之补偿反向电压。
补偿电压的幅值计算公式为:
其中factor为调整系数,一般取为0.7。

有平的台阶。而加入以上提出的死区补偿方法后,图5所示实际电流跟踪给定电流,得到了效果很好的正弦波形。
逆变器的开关死区效应对交流伺服系统的性能具有较大的影响,因此对开关死区进行校正补偿是必要的。本文在分析了各种死区补偿方法的基础上,提出了一种基于位置检测信号的动态补偿方法。该方法利用高分辨率的编码器来提高电流方向的判断精度,实验证明具有较好的补偿效果。(电子工程网)
电动机 电压 逆变器 电流 电路 传感器 滤波器 编码器 电子 相关文章:
- 基于DSP高精度伺服位置环设计(06-21)
- 基于DSP的工业缝纫机控制系统设计(09-23)
- 无传感器交流电动机控制技术提高了运行效率(10-15)
- 一种变频调速系统的SVPWM控制设计(02-03)
- FPGA在步进电机控制中的应用(03-07)
- 用C8051F构成的采集与控制系统(03-09)