基于C++Builder API函数的欧姆龙PLC串行通信
时间:11-21
来源:互联网
点击:
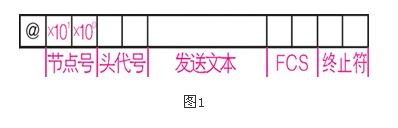
@:在起始处必须放置
节点号:有效值为00—31, 表示pc机最多可同32台plc通信
头代码:plc的命令代码
发送文本:pc机发送的命令参数
fcs(frame check sequence) :帧检查顺序代码(帧校验码)
帧校验码是2位(bit) 十六进制数。它是由帧数据包含的所有字符的ascii码进行位异或运算的结果。
终止符:“*”号和回车符“cr”
举例如下:
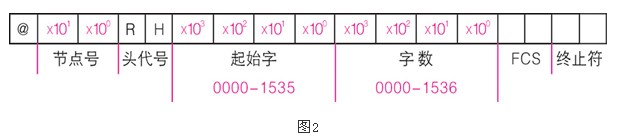
读h区命令帧结构如图2所示。
响应帧结构如图3所示。
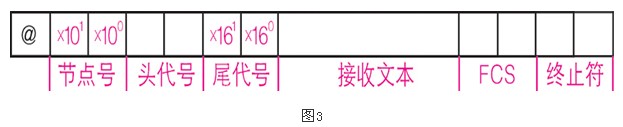
@ :返回命令头
节点号 :有效值为00—31,返回数据的plc节点号
头代码 :plc的命令代码
尾代码 : 返回命令完成状态码
接收文本: 在有数据时返回的数据
fcs :帧检查顺序代码
终止符:“*”号和回车符“cr”
举例如下:
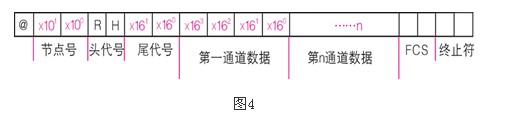
读h区响应帧结构图4所示。
为了降低串行通信的误码率,在接收和发送端都必须对数据进行校验,常用的方法是进行fcs校验。对帧数据进行冗余校验计算时,应对帧数据中各个字符的ascii码进行位异或运算,然后将结果转为2位十六进制字符。
5 c++builder api函数应用
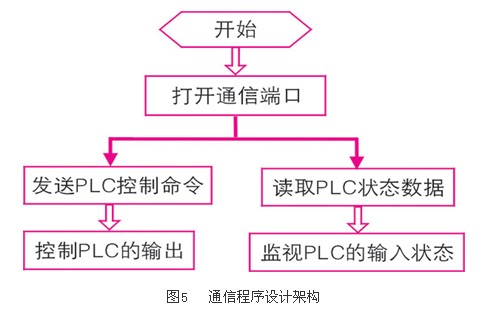
5.1 通信主程序的设计架构
通信主程序的主要功能:实现计算机对plc的运行控制和状态监视,即构成一个闭环监控系统,程序设计架构如图5所示。
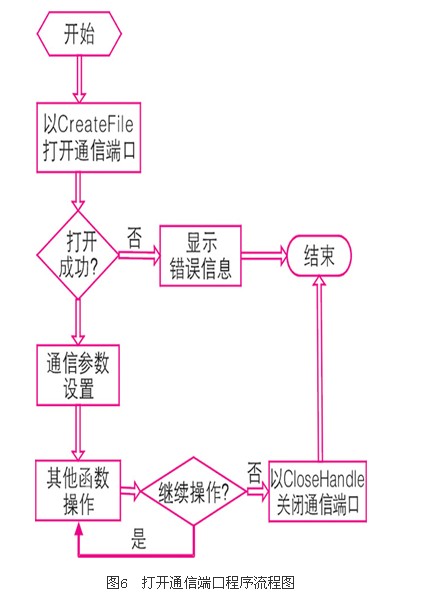
(1) 打开通信端口,对端口进行初始化设置,工作流程如图6示。
void__fastcall tform1::button1click(tobject *sender)
{
char *comno;
dcb dcb;
string temp;
temp=“com”+inttostr(rdcom-》itemindex+1);
comno=temp.c_str() ;
hcomm=createfile(comno,generic_read|generic_write,
0,null,open_existing,1,0);
if(hcomm==invalid_handle_value)
{
messagebox(0,“打开通信端口错误,请检查端口是否被占用!!” ,“comm error”,mb_ok);
return;
}
getcommstate(hcomm,&dcb);
dcb.baudrate=cbr_9600;
dcb.bytesize =7;
dcb.parity =evenparity;
dcb.stopbits =onestopbit;
setcommstate(hcomm,&dcb);
if(!setcommstate(hcomm,&dcb))
{
messagebox(0,“通信端口设置错误!!!”,“set error”,mb_ok);
closehandle(hcomm);
return;
}
}
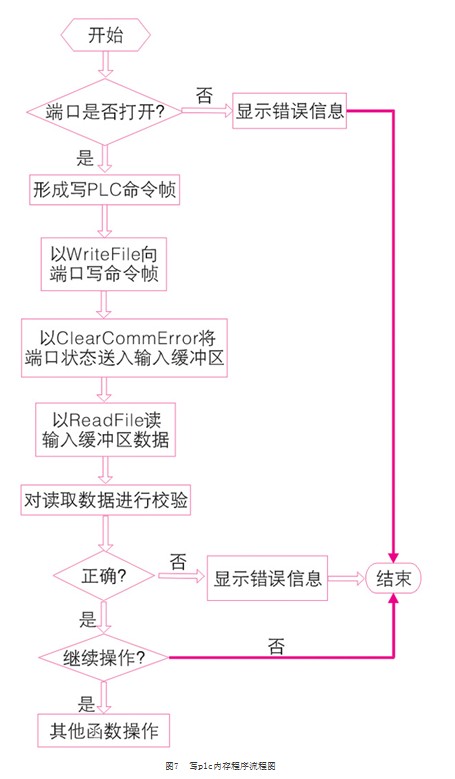
5.3 写plc内存数据
(1) 将计算机发出的命令写入plc,实现计算机对plc的控制功能。工作流程如图7示。
string tform1::write(string address,string value)
{
unsigned long lrc,bs;
string temp;
char *senddata;
char inbuff[1024];
int ln,i=0;
string word,check;
dword nbytesread,dwevent,dwerror;
comstat cs;
word=“@00wd”+address+value;
if(hcomm==0)
{
messagebox(0,“串口未打开!!!”,“错误信息”,mb_ok);
return(0);
}
temp=outchecksum(word);
senddata=temp.c_str() ;
bs=strlen(senddata);
loop:
if(++i《=3)
{
writefile(hcomm,senddata,bs,&lrc,null);
sleep(100);
if(hcomm==invalid_handle_value) return(0);
clearcommerror(hcomm,&dwerror,&cs);
if(cs.cbinque》sizeof(inbuff))
{
purgecomm(hcomm,purge_rxclear);
return(0);
}
readfile(hcomm,inbuff,15,&nbytesread,null);
check=inbuff;
if(check.substring(6,2)!=“00”)
{
goto loop;
}
}
else
{
messagebox(0,“数据写错误”,“通信错误”,mb_ok);
}
}
5.4 读plc内存数据
(1)从plc中读取数据,监视plc的运行数据,工作流程如图8示。

string tform1::read(string address,string value)
{
string readdata,readdata1,readdata2;
string temp;
unsigned long lrc,bs;
char *senddata;
int ln,i=0,len;
dword nbytesread,dwevent,dwerror;
comstat cs;
char inbuff[1024];
string word;
word=“@00rd”+address+value;
if(hcomm==0) return(0);
temp=outchecksum(word);
senddata=temp.c_str();
bs=temp.length();
loop:
if(++i《=3)
{
writefile(hcomm,senddata,bs,&lrc,null);
sleep(100);
if(hcomm==invalid_handle_value) return(0);
clearcommerror(hcomm,&dwerror,&cs);
if(cs.cbinque》sizeof(inbuff))
{
purgecomm(hcomm,purge_rxclear);
return(0);
}
cs.cbinque=4*strtoint(value)+11;
readfile(hcomm,inbuff,cs.cbinque,&nbytesread,null);
inbuff[cs.cbinque]=`\0`;
readdata =inbuff;
len=readdata.length();
if(len==0)
{
goto loop;
}
if(readdata.substring(6,2)!=“00”)
{
goto loop;
}
if(inchecksum(readdata)!=1)
{
goto loop;
}
}
else
{
messagebox(0,“读数据错误”,“通信错误”,mb_ok);
}
return(readdata);
}
- 一种新型防伪读码器的设计(01-01)
- 基于ARM与DSP的嵌入式运动控制器设计(04-25)
- 多核及虚拟化技术在工业和安全领域的应用(05-23)
- 航天器DC/DC变换器的可靠性设计(02-12)
- 我国科学家人脸与笔迹识别领域获突破(04-29)
- 基于ARM核的AT75C220及其在指纹识别系统中的应用(05-24)