工业设备中新型AC伺服电动机/驱动器技术特征与应用
时间:10-24
来源:互联网
点击:
ac伺服电动/驱动器超小型、高功能伺服,而且简单,又可轻而易举的高精度定位。应对各种用途的功能和丰富的伺服种类,可实现最佳组合,可在滚珠丝杠、传送带等方面应用。
应用案例
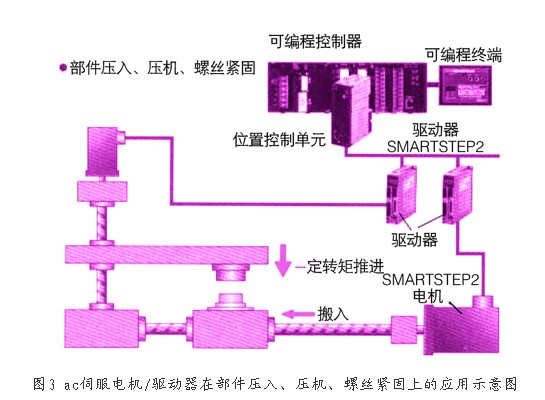
在部件压入、压机、螺丝紧固上的应用,见图3所示。其可编程控制器,用sysmac cj系列),位置控制单元用cj1w-ncf71型。
在绕卷、进给控制上的应用示意图,见图4所示。

交流伺服电动机驱动器由于其应用简便和性能可靠,已广泛的应用在数控机床与工业位置传动装置中。市场上新型的交流伺服电动机驱动器都具有符合rs485协议的串行通信接口,计算机可利用这一接口电路与驱动器之间实现串行通信,向驱动器发出相应的位置运行指令和速度运行指令,控制伺服电机的运行,并及时反馈电机的运行数据,供计算机分析.由于这种方法控制的稳定性好、精度高、传输距离远、可双向交流控制信息、线路简单、很有发展前景。
上位机与伺服驱动器间的通信设计方案
现在工业用伺服驱动器通常都配置了rs485通信接口,利用该接口通过编制相应的驱动程序即可以实现上位机与伺服驱动器的信息交互。
rs485串行通信:工业rs485通信采用2线双绞传输方式,即数据d+和数据d—,这种数据差动传输方式可以有效地消除干扰的影响。另外,rs485通信为1:n方式,1台主控机(上位机)可级连多达16台被控机(伺服驱动器)。
rs485通信规则:采用选择/查询方式,被控机(伺服驱动器)常处于等待主机选择或查询状态。伺服驱动器在待机状态时,符合编号的被控机(伺服驱动器)接收到主机的帧信号,判断为正常接收信号后,对帧信号处理。
通信的连接:在主控机端为rs232/rs485转换接口,而被控机端为rs485通信口。在主控机和被控机之间用2线双绞屏蔽电缆连接,在被控机末端加终端电阻。
高速伺服通信的运动网络的应用
伺服系统是机电产品中的重要环节,随着计算机技术的进展,交流伺服系统在经过广泛运用的前景下正向着网络化控制方向发展。值此有必要介绍对新型ac伺服电机/驱动器的高速伺服通信运动网络技术的应用作介绍。
基于独立数字运动控制器的网络伺服系统的集成
独立性的数字运动控制器的网络伺服系统就是在运动控制时,脱离计算机或工控机的通讯操作控制,直接把控制程序和要运行的程序下载到运动控制器本身所带的闪存里面。有设备的外围触发信号触发程序就开始运行。值此是基于以omron公司的以smartstep2驱动器与r88m-g伺服电机为例的的网络伺服系统的系统集成的结构示意框图,见图5所示。
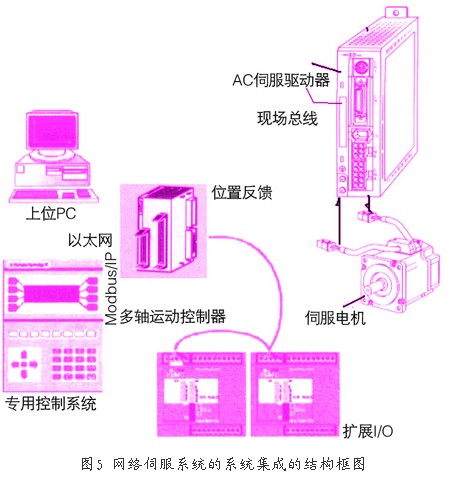
在图5的网络伺服运动控制系统中,控制器不断产生更新的位置命令(运动曲线),通过现场总线下传给驱动器,在总线节点解释指令后将转化为数宇脉冲信号,以控制交流伺服电动机,完成定位。在一个多轴系统中,一个控制器可以控制多个电机驱动器。伺服电动机是主要的执行部件,完成具体动作。图5中运动控制器可用fqm1-mm22型多轴运动控制器,也可用mc260这些控制器采用工业专用的32位,120hhz~150hhz的最新微处理技术,融合最新的控制理论及其网络控制技术,可选用不同的控制器可控制1—24个轴。可以用0~±10v的模拟量电压输出和编码器反馈形成全闭环控制,来控制伺服电动机。也可以控制步进电动机,变频器,气动,液压伺服,或者是这几种的任意结合。
结语
众所周如,数控机床与工业自动化离不开伺服电机/驱动器动力源的智能化,尤其是当今处于网络化时代,除了动力装置的智能化外,还需网络化。而上述的新型ac伺服电动机/驱动器技术特征与应用介绍,比较理想能的解决了伺服电动机/驱动器从设计→-安装→调整启动→运行→维护众各阶段问题的智能化,它是工业自动化的工程设计人员一种较好的选择,也为工业自动化系统的研发拓宽了设计思路。
来源:伺服世界
机器人 总线 电动机 自动化 滤波器 编码器 rs485 电路 电阻 嵌入式 电压 相关文章:
- 基于ARM与DSP的嵌入式运动控制器设计(04-25)
- 双目三维定位的视频运动检测控制系统设计(01-21)
- 光电鼠标传感器的精密测量与控制系统(04-13)
- 基于S7-200的步进电机控制器设计(04-26)
- 基于运动控制芯片的机械手控制系统设计(06-08)
- 嵌入式系统在军用PDA中的设计与实现(06-08)