基于光纤陀螺仪的轨道方向不平顺检测系统
时间:01-21
来源:互联网
点击:
5.实验效果
轨道方向(陀螺仪转过的角度)是通过实际采集的信号与上次所求的(初始)基准零点之差求和实现。实验输出曲线见图 3其中横坐标为秒,纵坐标为角度量(未标定位为实际角度),由图3可知在1小时内角度漂移没超过400000,化为实际角度为:400000/16/224*3/0.037=0.06o,漂移非常小。突变曲线是陀螺仪缓慢运动时输出的,反应非常灵敏。
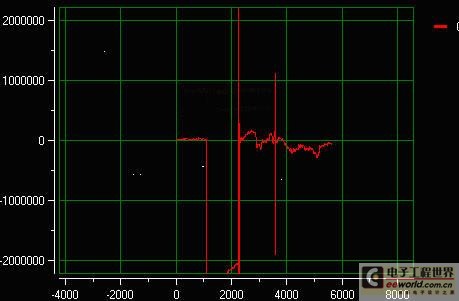
图3 陀螺仪输出轨向图
6.结束语
本文作者创新点:该系统采用精密的光纤陀螺仪作为小型轨检车测量方向不平顺的传感器,这是一种新的尝试,并在实践中逐步形成了零点渐变算法,此算法是系统成败的关键。带有数字滤波功能的24位A/D AD7714的应用提高了抗干扰能力及测量精度,零点渐变算法、积分功能使得所求角度漂移小精度高,而P89V51RD2提供了更大的数据存储空间,其ISP/IAP功能利于对系统程序的修改或升级。
轨道方向(陀螺仪转过的角度)是通过实际采集的信号与上次所求的(初始)基准零点之差求和实现。实验输出曲线见图 3其中横坐标为秒,纵坐标为角度量(未标定位为实际角度),由图3可知在1小时内角度漂移没超过400000,化为实际角度为:400000/16/224*3/0.037=0.06o,漂移非常小。突变曲线是陀螺仪缓慢运动时输出的,反应非常灵敏。
图3 陀螺仪输出轨向图
6.结束语
本文作者创新点:该系统采用精密的光纤陀螺仪作为小型轨检车测量方向不平顺的传感器,这是一种新的尝试,并在实践中逐步形成了零点渐变算法,此算法是系统成败的关键。带有数字滤波功能的24位A/D AD7714的应用提高了抗干扰能力及测量精度,零点渐变算法、积分功能使得所求角度漂移小精度高,而P89V51RD2提供了更大的数据存储空间,其ISP/IAP功能利于对系统程序的修改或升级。
陀螺仪 电路 放大器 电阻 传感器 滤波器 电压 单片机 相关文章:
- 解密波音747飞机中的Sperry垂直陀螺仪(05-06)
- 陀螺的历史(06-24)
- 基于Fuzzy-PID的陀螺仪温度控制系统设计(06-08)
- GPS在现代交通运输中的应用(08-06)
- PMAC运动控制卡在AGV控制系统中的应用(08-10)
- 多传感器融合定位在高速铁路的应用(08-18)