多传感器融合定位在高速铁路的应用
时间:08-18
来源:互联网
点击:
2009年在武广、郑西等客运专线中,C3列控系统的应用,对高速铁路列车定位技术提出了更高的要求。C3列控系统的主要技术原则中明确提出,列车的运营速度达到350 km/h,最小追踪间隔为3 min,并且300 km/h及以上动车组不装设列车运行监控装置,在300 km/h及以上线路,CTCS-3级列控系统车载设备速度容限规定为超速2 km/h报警、超速5 km/h触发常用制动、超速15 km/h触发紧急制动。这些技术原则要求高速铁路列车运行控制系统必须在任何时刻、任何地方都能确定列车的准确位置,包括列车的行车安全的相关间隔、速度、加速度及轨旁设备和车载设备资源的分配。由这些信息来确定是否需要采取制动措施,保证安全间隔。目前,陀螺、加速度计、里程仪、GPS接收机等传感器已经普遍应用于列车测速定位系统。
1 高速铁路技术的发展
高速铁路技术的发展是多种多样的,各个国家根据其路况、地形、运营需求采用不同的定位技术。法国AS-TREE系统采用多普勒雷达进行测速定位;北美ARES,PTC,PTS系统采用GPS(全球定位系统)进行定位;欧洲ETCS、日本CARAT系统采用查询/应答器和速度传感器进行定位;德国LZB系统采用轨间电缆进行列车定位;美国AATC系统采用无线测距进行定位。

根据中国铁路地形、线路的复杂状况及高速铁路对列车定位技术的要求,文中提出了多传感器组合定位的方案,选用GPS/DR/MM组合定位的方式,利用多传感器组合定位技术信息互补的特点,采用卡尔曼滤波将所得信息进行数据融合,得到比单一传感器定位更精确的定位数据。
2 列车定位系统方案
该方案利用DR自主定位的特点,可以保证列车在任何地方、任何时候都可以输出定位信息,而GPS的采用可以给DR提供初始位置数据,MM的运用满足了系统对定位精度的需求。融合算法部分采用联邦滤波算法,解决了其他滤波算法计算负担重,容错性能差的缺点。
2.1 列车定位方式的选择
2.1.1 定位方式介绍
GPS是一种无线电导航系统。作为最早应用于导航定位系统的高新技术,有着在全球范围内、在任意时刻、任意气象条件下为用户提供连续不断的高精度三维位置、速度和时间信息的特点。采用GPS定位时只需要在机车上安装接收机即可,但在周围阻挡物多的地方列车的定位精度会受到影响。并且,GPS对卫星故障十分敏感,一但一颗卫星失效,就会出现GPS性能恶化的情况。所以,不能单一的将GPS定位信息作为列控系统的位置参数。
DR是车辆定位导航中采用的一种比较经典的算法。它由测量航向的传感器和测量距离的传感器构成。本方案中采用里程仪作为测量距离的传感器,陀螺仪作为测量航向的传感器。里程仪输出的是脉冲信号。车轮每转一圈,里程仪输出固定数量的脉冲信号,通过累加一定时间内的里程仪的脉冲数目,可以计算出车辆在这一段时间内所驶过的距离,也可以计算出车辆行驶的速度。陀螺仪输出航向角的角速率信息。将陀螺输出的角速率信息积分可得到列车的相对转角。与GPS相比,DR可以自主定位,不存在遮挡等问题引起的列车定位信息遗失。但DR系统的初始位置无法自主得到,并且航迹推算是一个累加的过程,不同时刻的测量误差和计算误差都会累积起来,随着时间的推移,DR误差是一个发散的过程。
2.1.2 定位方案
根据以上对GPS和DR定位特点的分析,本方案采取多传感器组合定位技术,即各种定位技术互相补充的方案。在铁路线路区间,当GPS信息连续时在机车头部安装的GPS接收机将GPS信息送给定位系统,GPS信息作为主信息,DR信息和查询应答器信息作为校验信息,三者联合滤波后给出最优的定位估计信息。
遇到“城市峡谷“等障碍区时,GPS信号会消失或减弱,这时采用DR信息作为主信息。GPS失效前一点位置正好可以作为DR的初始位置,有了初始位置以后,利用里程仪和陀螺仪就可以对下一时刻列车的位置做出估计。
列车进入车站后,由于股道线间距很小,GPS和DR的定位精度已经不能很好的表现出股道的差异,因此采用查询应答器来获得列车在站内的定位信息。此时查询应答器信息作为主信息,而GPS信息和DR信息作为校验信息。
2.2 数据融合方法
该方案最核心的问题就是系统基于数据融合的定位算法的设计。在列车测速定位领域应用的数据融合方法有判断检测理论、估计理论、数据关联等,而应用最广泛的就是估计理论中的卡尔曼滤波方法。与其他估计算法相比,卡尔曼滤波具有显著的优点:采用状态空间法在时域内设计滤波器,用状态方程就可以描述任何复杂多维信号的动力学特性,避开了在频域内对信号功谱做分解带来的麻烦,滤波器的设计简单易行,采用递推算法。所以卡尔曼滤波能适用于任何平稳或非平稳随机向量过程的估计,所得估计在线性估计中精度最佳。目前已经开发的滤波算法包括线性卡尔曼滤波,扩展卡尔曼滤波以及联邦卡尔曼滤波。该方案采用联邦卡尔曼滤波进行数据融合。

2.2.1 数据融合的联合卡尔曼滤波模型
此滤波算法中,取βm=0,即主滤波器没有信息输入,进一步优化系统,减少了运算量。
2.2.2 系统滤波算法步骤
(1)由局部滤波器l处理GPS接收机输出的列车位置信息,并给出状态估计x1和估计误差的协方差矩阵p1;
(2)局部滤波器2处理陀螺仪和里程仪输出的角度信息x2和列车运行距离信息,给出状态估计和估计误差的协方差矩阵p2;
(3)局部滤波器3处理查询应答器输出的进路长度等信息,给出状态估计x3和估计误差的协方差矩阵p3;
(4)x1,x2,x3,及p1,p2,p3被送到主滤波器,并同主滤波器的状态估计一起按式(1)和式(2)进行融合,得到全局最优估计和协方差矩阵

(5)利用主滤波器的最优估计值对3个子滤波器的状态估计进行重置。即

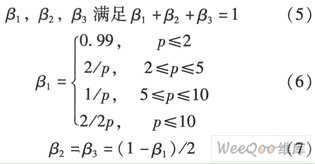
2.2.3 信息分配参数的选择
不同的信息分配系数可以获得联邦滤波器的不同结构以及不同的容错性能、滤波精度和计算量。本方案中设计了一种自适应联邦卡尔曼滤波器。利用GPS接收机输出的反映定位精度的参数为依据,自动调整P值的大小。本定位系统根据GPS接收机的p值大小来决定取值。具体的自适应算法为
2.3 地图匹配
GPS和DR系统的组合导航在一定程度上提高了定位系统的精度和可靠性,但定位数据仍然存在一定误差,并且当GPS数据丢失时,DR系统的误差会累积变大。在实际系统中通常采用地图匹配算法来进一步提高GPS和DR系统的精度。
地图匹配的基本思想是将车辆定位轨迹与数字地图中的道路网信息联系起来,并由此相对于地图确定车辆的位置。地图匹配的算法分为两个相对独立的过程:一是道路选择,主要是对道路进行分段,提取道路特征信息,然后采用适当的搜索规则和匹配算法根据当前传感器给出的车辆信息,在地图数据库中寻找一条最有可能的道路;二是道路匹配,将车辆当前位置匹配并显示在这条道路上,用于消除传感器的定位误差。
3 结束语
针对高速铁路列车运行控制系统中的列车定位问题,提出了GPS/DR/MM组合定位的方案,利用卡尔曼滤波对多传感器的数据信息进行融合之后再与电子地图匹配,实时提供列车的定位信息。与单一传感器定位方式相比,可以进一步提高列车的测速定位精度,保证了高速列车安全、可靠的运行。
1 高速铁路技术的发展
高速铁路技术的发展是多种多样的,各个国家根据其路况、地形、运营需求采用不同的定位技术。法国AS-TREE系统采用多普勒雷达进行测速定位;北美ARES,PTC,PTS系统采用GPS(全球定位系统)进行定位;欧洲ETCS、日本CARAT系统采用查询/应答器和速度传感器进行定位;德国LZB系统采用轨间电缆进行列车定位;美国AATC系统采用无线测距进行定位。
根据中国铁路地形、线路的复杂状况及高速铁路对列车定位技术的要求,文中提出了多传感器组合定位的方案,选用GPS/DR/MM组合定位的方式,利用多传感器组合定位技术信息互补的特点,采用卡尔曼滤波将所得信息进行数据融合,得到比单一传感器定位更精确的定位数据。
2 列车定位系统方案
该方案利用DR自主定位的特点,可以保证列车在任何地方、任何时候都可以输出定位信息,而GPS的采用可以给DR提供初始位置数据,MM的运用满足了系统对定位精度的需求。融合算法部分采用联邦滤波算法,解决了其他滤波算法计算负担重,容错性能差的缺点。
2.1 列车定位方式的选择
2.1.1 定位方式介绍
GPS是一种无线电导航系统。作为最早应用于导航定位系统的高新技术,有着在全球范围内、在任意时刻、任意气象条件下为用户提供连续不断的高精度三维位置、速度和时间信息的特点。采用GPS定位时只需要在机车上安装接收机即可,但在周围阻挡物多的地方列车的定位精度会受到影响。并且,GPS对卫星故障十分敏感,一但一颗卫星失效,就会出现GPS性能恶化的情况。所以,不能单一的将GPS定位信息作为列控系统的位置参数。
DR是车辆定位导航中采用的一种比较经典的算法。它由测量航向的传感器和测量距离的传感器构成。本方案中采用里程仪作为测量距离的传感器,陀螺仪作为测量航向的传感器。里程仪输出的是脉冲信号。车轮每转一圈,里程仪输出固定数量的脉冲信号,通过累加一定时间内的里程仪的脉冲数目,可以计算出车辆在这一段时间内所驶过的距离,也可以计算出车辆行驶的速度。陀螺仪输出航向角的角速率信息。将陀螺输出的角速率信息积分可得到列车的相对转角。与GPS相比,DR可以自主定位,不存在遮挡等问题引起的列车定位信息遗失。但DR系统的初始位置无法自主得到,并且航迹推算是一个累加的过程,不同时刻的测量误差和计算误差都会累积起来,随着时间的推移,DR误差是一个发散的过程。
2.1.2 定位方案
根据以上对GPS和DR定位特点的分析,本方案采取多传感器组合定位技术,即各种定位技术互相补充的方案。在铁路线路区间,当GPS信息连续时在机车头部安装的GPS接收机将GPS信息送给定位系统,GPS信息作为主信息,DR信息和查询应答器信息作为校验信息,三者联合滤波后给出最优的定位估计信息。
遇到“城市峡谷“等障碍区时,GPS信号会消失或减弱,这时采用DR信息作为主信息。GPS失效前一点位置正好可以作为DR的初始位置,有了初始位置以后,利用里程仪和陀螺仪就可以对下一时刻列车的位置做出估计。
列车进入车站后,由于股道线间距很小,GPS和DR的定位精度已经不能很好的表现出股道的差异,因此采用查询应答器来获得列车在站内的定位信息。此时查询应答器信息作为主信息,而GPS信息和DR信息作为校验信息。
2.2 数据融合方法
该方案最核心的问题就是系统基于数据融合的定位算法的设计。在列车测速定位领域应用的数据融合方法有判断检测理论、估计理论、数据关联等,而应用最广泛的就是估计理论中的卡尔曼滤波方法。与其他估计算法相比,卡尔曼滤波具有显著的优点:采用状态空间法在时域内设计滤波器,用状态方程就可以描述任何复杂多维信号的动力学特性,避开了在频域内对信号功谱做分解带来的麻烦,滤波器的设计简单易行,采用递推算法。所以卡尔曼滤波能适用于任何平稳或非平稳随机向量过程的估计,所得估计在线性估计中精度最佳。目前已经开发的滤波算法包括线性卡尔曼滤波,扩展卡尔曼滤波以及联邦卡尔曼滤波。该方案采用联邦卡尔曼滤波进行数据融合。
2.2.1 数据融合的联合卡尔曼滤波模型
此滤波算法中,取βm=0,即主滤波器没有信息输入,进一步优化系统,减少了运算量。
2.2.2 系统滤波算法步骤
(1)由局部滤波器l处理GPS接收机输出的列车位置信息,并给出状态估计x1和估计误差的协方差矩阵p1;
(2)局部滤波器2处理陀螺仪和里程仪输出的角度信息x2和列车运行距离信息,给出状态估计和估计误差的协方差矩阵p2;
(3)局部滤波器3处理查询应答器输出的进路长度等信息,给出状态估计x3和估计误差的协方差矩阵p3;
(4)x1,x2,x3,及p1,p2,p3被送到主滤波器,并同主滤波器的状态估计一起按式(1)和式(2)进行融合,得到全局最优估计和协方差矩阵
(5)利用主滤波器的最优估计值对3个子滤波器的状态估计进行重置。即
2.2.3 信息分配参数的选择
不同的信息分配系数可以获得联邦滤波器的不同结构以及不同的容错性能、滤波精度和计算量。本方案中设计了一种自适应联邦卡尔曼滤波器。利用GPS接收机输出的反映定位精度的参数为依据,自动调整P值的大小。本定位系统根据GPS接收机的p值大小来决定取值。具体的自适应算法为
2.3 地图匹配
GPS和DR系统的组合导航在一定程度上提高了定位系统的精度和可靠性,但定位数据仍然存在一定误差,并且当GPS数据丢失时,DR系统的误差会累积变大。在实际系统中通常采用地图匹配算法来进一步提高GPS和DR系统的精度。
地图匹配的基本思想是将车辆定位轨迹与数字地图中的道路网信息联系起来,并由此相对于地图确定车辆的位置。地图匹配的算法分为两个相对独立的过程:一是道路选择,主要是对道路进行分段,提取道路特征信息,然后采用适当的搜索规则和匹配算法根据当前传感器给出的车辆信息,在地图数据库中寻找一条最有可能的道路;二是道路匹配,将车辆当前位置匹配并显示在这条道路上,用于消除传感器的定位误差。
3 结束语
针对高速铁路列车运行控制系统中的列车定位问题,提出了GPS/DR/MM组合定位的方案,利用卡尔曼滤波对多传感器的数据信息进行融合之后再与电子地图匹配,实时提供列车的定位信息。与单一传感器定位方式相比,可以进一步提高列车的测速定位精度,保证了高速列车安全、可靠的运行。
加速度计 GPS 传感器 PTC 无线电 陀螺仪 滤波器 电子 相关文章:
- 陀螺的历史(06-24)
- 基于NI cRIO的多通道强震动监测与报警系统开发(05-11)
- PCI-1711数据采集卡及其应用(06-09)
- 水平定向钻进跟踪/导向仪中地下传感发射探头(07-12)
- 压力传感器原理(07-26)
- 压力传感器的原理简介(09-01)