带修正因子模糊PID控制的PMSM交流伺服系统
时间:12-14
来源:互联网
点击:
2 系统仿真模型
本系统采用MATLAB7.0强大功能的Simulink仿真模块进行仿真。仿真中设置PMSM参数如下:
定子电阻R=2.875 Ω;电枢电感Ld=Lq=8.510-3H;磁通φ=0.175 Wb;极对数p=4。并且设置电机在O.2 s时转矩由4 Nm突变为7 Nm;转速给定为700 r/min。图2给出了系统仿真框图。
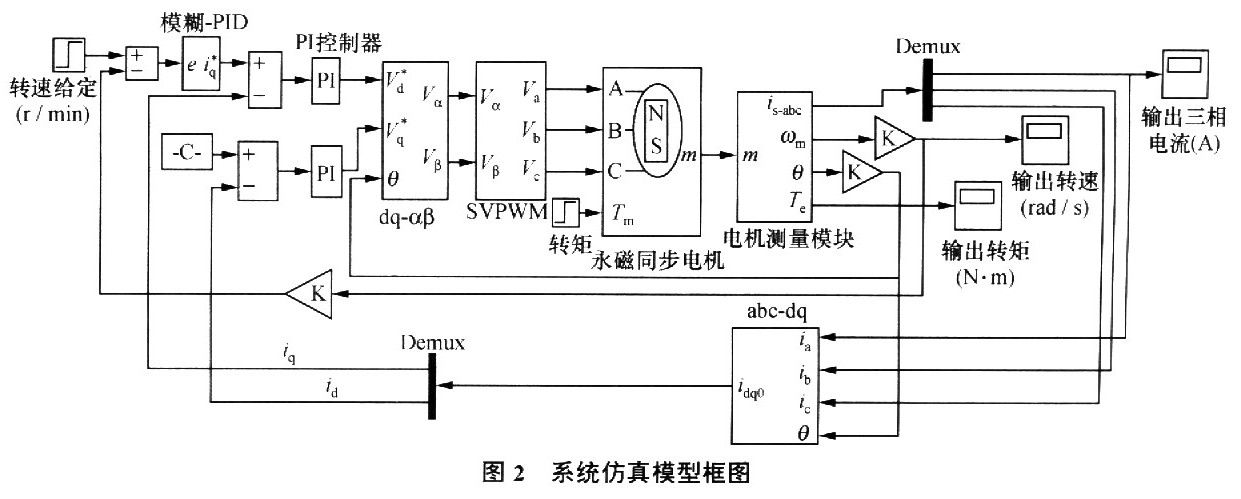
本系统采用的是基于数字信号处理器(DSP)的全数字交流伺服系统。这样控制函数都可通过软件编程在DSP里实现,而不用另建硬件电路,使得整个系统结构变得简单紧凑。而且全数字控制使得伺服系统的可靠性更高,控制参数比硬件电路更易调整。
系统主要包括:
1)磁极位置检测模块和电流检测模块;
2)速度环和电流环控制;
3)坐标变换模块;
4)空间矢量脉宽调制(SVPWM)模块;
5)整流器和逆变器模块。
系统中功率模块驱动采用目前最常用的脉宽调制(PWM)优化方法SVPWM,它能明显减少逆变器输出电流的谐波成份和电机的谐波损耗,降低脉动转矩。随着DSP技术的发展,计算功能的加强,存储容量的增大,使得PWM的数字化实现越来越方便。
电流环采用PI控制算法,速度环采用fuzzy-PID控制,电流调节器和转速调节器采用带饱和限幅的PI调节器。
电流环电枢电流的反馈值与电流的指令信号进行比较得电流误差,由电流环调节器按误差进行调节控制,使电流快速跟随指令值变化,稳态时电流无静差。电流控制器输出的经旋转/静止坐标系变换到静止坐标系下的Vα和Vβ后,再通过功率驱动模块得到电机三相绕组的电压Va、Vb和Vc;检测绕组电流经过静止/旋转坐标系变换到旋转坐标系下的id和iq。
速度环中速度指令信号与速度反馈信号的速度误差,由速度调节器按速度误差进行调节控制,使电动机转速快速跟随指令值变化,稳态时速度无静差,动态时限制转速超调,会大大减小负载变化对转速变化的影响。同时,由于转速负反馈的作用,检测转子角速度并经过系数转换得到转子的实际转速。检测变量与参考变量比较后的误差作为速度环和电流环的输入,从而构成了整个系统的闭环控制。
3 系统仿真结果
为了比较PID控制和Fuzzyr-PID控制性能,图3和图4给出了分别采用PID控制和Fuzzy-PID控制时的速度阶跃响应。
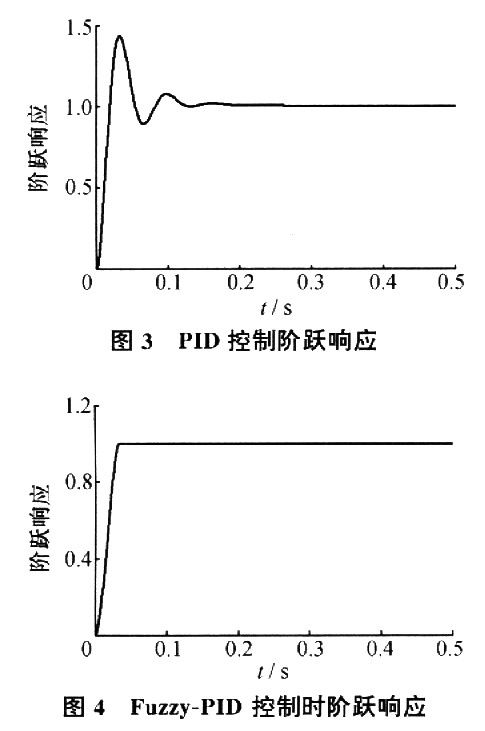
由图可以看出,当采用PID控制时,速度出现超调和振荡现象,这将在电机启动过程中造成很大的冲击;采用Fuzzy-PID后,无超调和振荡现象,鲁棒性好,系统响应速度明显改善。
图5和图6为对本系统采用Fuzzy-PID)控制时转矩Te和转速n的仿真图。由图可知,当负载转矩在0.2 s由4Nm突然增至7Nm时,转矩很快调整到新的稳定值;同时由于SVPWM的连续调节,转矩的脉动小;而转速在O.2 s时稍微下降,后迅速恢复原速度。

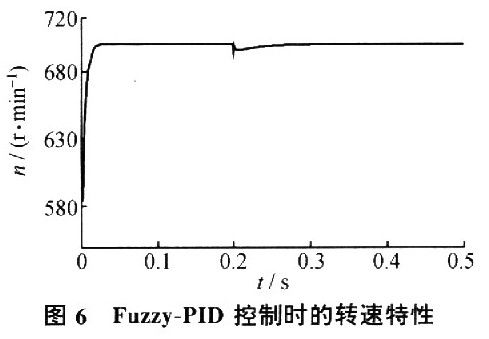
由此可见,系统所采用的控制策略具有跟踪性能好、响应速度快、过渡时间短、无超调、稳定性好以及控制精度高等特点,这与前面的理论分析是一致的。
4 结 论
本文将fuzzy控制和PID控制相结合,应用到PMSM交流伺服控制系统当中,不仅避免了控制器的设计时受被控对象的复杂数学模型的限制,而且克服了伺服系统的时变性、强耦合性和不确定性因素的影响,提高了系统响应速度和控制精度,跟踪性能好。另外,为了改善模糊控制器的性能系统控制,利用修正因子对模糊控制器的参数进行在线修改,保证了系统具有良好的动态和静态性能和鲁棒性,证明了此方法的正确性和可行性。
本系统采用MATLAB7.0强大功能的Simulink仿真模块进行仿真。仿真中设置PMSM参数如下:
定子电阻R=2.875 Ω;电枢电感Ld=Lq=8.510-3H;磁通φ=0.175 Wb;极对数p=4。并且设置电机在O.2 s时转矩由4 Nm突变为7 Nm;转速给定为700 r/min。图2给出了系统仿真框图。
本系统采用的是基于数字信号处理器(DSP)的全数字交流伺服系统。这样控制函数都可通过软件编程在DSP里实现,而不用另建硬件电路,使得整个系统结构变得简单紧凑。而且全数字控制使得伺服系统的可靠性更高,控制参数比硬件电路更易调整。
系统主要包括:
1)磁极位置检测模块和电流检测模块;
2)速度环和电流环控制;
3)坐标变换模块;
4)空间矢量脉宽调制(SVPWM)模块;
5)整流器和逆变器模块。
系统中功率模块驱动采用目前最常用的脉宽调制(PWM)优化方法SVPWM,它能明显减少逆变器输出电流的谐波成份和电机的谐波损耗,降低脉动转矩。随着DSP技术的发展,计算功能的加强,存储容量的增大,使得PWM的数字化实现越来越方便。
电流环采用PI控制算法,速度环采用fuzzy-PID控制,电流调节器和转速调节器采用带饱和限幅的PI调节器。
电流环电枢电流的反馈值与电流的指令信号进行比较得电流误差,由电流环调节器按误差进行调节控制,使电流快速跟随指令值变化,稳态时电流无静差。电流控制器输出的经旋转/静止坐标系变换到静止坐标系下的Vα和Vβ后,再通过功率驱动模块得到电机三相绕组的电压Va、Vb和Vc;检测绕组电流经过静止/旋转坐标系变换到旋转坐标系下的id和iq。
速度环中速度指令信号与速度反馈信号的速度误差,由速度调节器按速度误差进行调节控制,使电动机转速快速跟随指令值变化,稳态时速度无静差,动态时限制转速超调,会大大减小负载变化对转速变化的影响。同时,由于转速负反馈的作用,检测转子角速度并经过系数转换得到转子的实际转速。检测变量与参考变量比较后的误差作为速度环和电流环的输入,从而构成了整个系统的闭环控制。
3 系统仿真结果
为了比较PID控制和Fuzzyr-PID控制性能,图3和图4给出了分别采用PID控制和Fuzzy-PID控制时的速度阶跃响应。
由图可以看出,当采用PID控制时,速度出现超调和振荡现象,这将在电机启动过程中造成很大的冲击;采用Fuzzy-PID后,无超调和振荡现象,鲁棒性好,系统响应速度明显改善。
图5和图6为对本系统采用Fuzzy-PID)控制时转矩Te和转速n的仿真图。由图可知,当负载转矩在0.2 s由4Nm突然增至7Nm时,转矩很快调整到新的稳定值;同时由于SVPWM的连续调节,转矩的脉动小;而转速在O.2 s时稍微下降,后迅速恢复原速度。
由此可见,系统所采用的控制策略具有跟踪性能好、响应速度快、过渡时间短、无超调、稳定性好以及控制精度高等特点,这与前面的理论分析是一致的。
4 结 论
本文将fuzzy控制和PID控制相结合,应用到PMSM交流伺服控制系统当中,不仅避免了控制器的设计时受被控对象的复杂数学模型的限制,而且克服了伺服系统的时变性、强耦合性和不确定性因素的影响,提高了系统响应速度和控制精度,跟踪性能好。另外,为了改善模糊控制器的性能系统控制,利用修正因子对模糊控制器的参数进行在线修改,保证了系统具有良好的动态和静态性能和鲁棒性,证明了此方法的正确性和可行性。
仿真 电流 电阻 电感 DSP 电路 PWM 逆变器 电压 电动机 相关文章:
- ARM在数字化远程视频监控系统的应用(05-20)
- FPGA在弹上信息处理机中的应用(04-15)
- 与MSP430 USI端口配合使用ADS8361(06-18)
- 基于ARM的I2C设备控制方法的实现(06-11)
- 辰汉电子推出低成本快速量产视频监控方案+4路输入方案(06-24)
- 无线IP视频监控应用即将井喷,Blackfin助您赢得先机(07-23)