矿山机车无速度传感器矢量控制系统
时间:12-07
来源:互联网
点击:
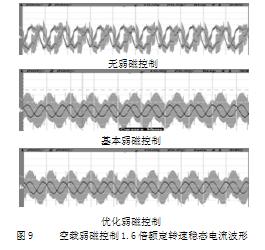
基本弱磁控制
由于在电压约束表达式中,所以在转速超过额定转速后令,其中为额定同步转速,为当前电机同步转速,为额定励磁电流。这样可以保证维持电流所需的电压基本恒定,不会随转速升高而明显上升。为了方便工程实现,常用电机的转子速度代替。由于电机转矩与乘积成正比。此时随着转速的上升,电机的输出转矩会随速度的反比降低,电机的输出功率恒定,这就是基本弱磁控制。此种控制方法下,电机的转矩和功率输出如图3所示。
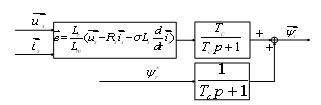
此种方法不受电机参数的影响,便于工程实现,但是没有考虑全部电机运行约束的限制,无法合理分配电流以使转矩最大化,而且由于电机内部,所以此算法无法保持励磁电压恒定,励磁电压会随着转速的上升而不断增大,可能导致电流无法有效跟随,影响运行稳定性。
优化弱磁控制

6.结论
由于矿山机车工作环境的特殊性,在设计矿山机车牵引电机矢量控制系统时必须考虑速度估算环节和弱磁控制环节,基于MRAS方法的转速估算方法可以同时估算电机的转速和磁链信息,简化了系统结构,较为适合应用于牵引电机矢量控制系统中。优化弱磁控制可以保证电机的最大转矩输出,使电机有更好的带载能力和更宽的运行范围,较为适合应用在对电机转矩输出要求较高的牵引电机矢量控制系统中。
由于在电压约束表达式中,所以在转速超过额定转速后令,其中为额定同步转速,为当前电机同步转速,为额定励磁电流。这样可以保证维持电流所需的电压基本恒定,不会随转速升高而明显上升。为了方便工程实现,常用电机的转子速度代替。由于电机转矩与乘积成正比。此时随着转速的上升,电机的输出转矩会随速度的反比降低,电机的输出功率恒定,这就是基本弱磁控制。此种控制方法下,电机的转矩和功率输出如图3所示。
此种方法不受电机参数的影响,便于工程实现,但是没有考虑全部电机运行约束的限制,无法合理分配电流以使转矩最大化,而且由于电机内部,所以此算法无法保持励磁电压恒定,励磁电压会随着转速的上升而不断增大,可能导致电流无法有效跟随,影响运行稳定性。
优化弱磁控制
6.结论
由于矿山机车工作环境的特殊性,在设计矿山机车牵引电机矢量控制系统时必须考虑速度估算环节和弱磁控制环节,基于MRAS方法的转速估算方法可以同时估算电机的转速和磁链信息,简化了系统结构,较为适合应用于牵引电机矢量控制系统中。优化弱磁控制可以保证电机的最大转矩输出,使电机有更好的带载能力和更宽的运行范围,较为适合应用在对电机转矩输出要求较高的牵引电机矢量控制系统中。
- 多核及虚拟化技术在工业和安全领域的应用(05-23)
- 基于ARM核的AT75C220及其在指纹识别系统中的应用(05-24)
- 基于音频信号的轴承故障诊断方法(03-17)
- 采用信号调理IC驱动应变片电桥传感器(05-26)
- 基于nRF2401智能无线火灾监控系统设计(04-01)
- 家居安防无线监控报警系统(04-02)