基于虚拟多传感器信息融合的粮情预警系统
时间:12-07
来源:互联网
点击:
3 信息融合
通过以上方法将温湿度、图像数据经过变换,得到具有不同特性的虚拟多传感器信息。利用D-S证据理论进行信息融合,D-S证据理论是由Dempster提出来的用概率上下限来表示实际问题中的不确定性,后来通过ShaRer进一步发展成为系统化、理论化的不确定性推理理论。由于篇幅有限,在此只给出部分信息融合过程。
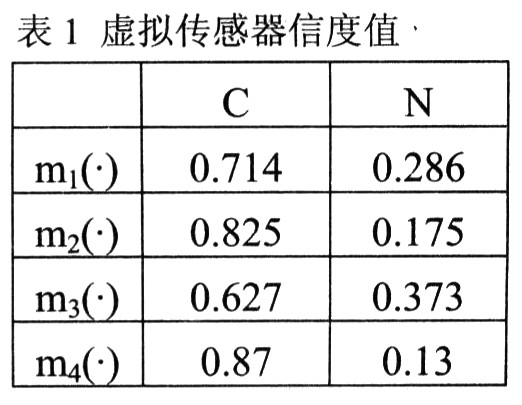
通过实际测量的数据,经过计算得到某一区域的四个虚拟传感器信度值m1,m2,m3,m4如表l,用C表示可信度,N表示不可信度。
按照Dempster组合公式将m1和m2,m3和m4组合,结果如表2所示,其中φ表示空集。
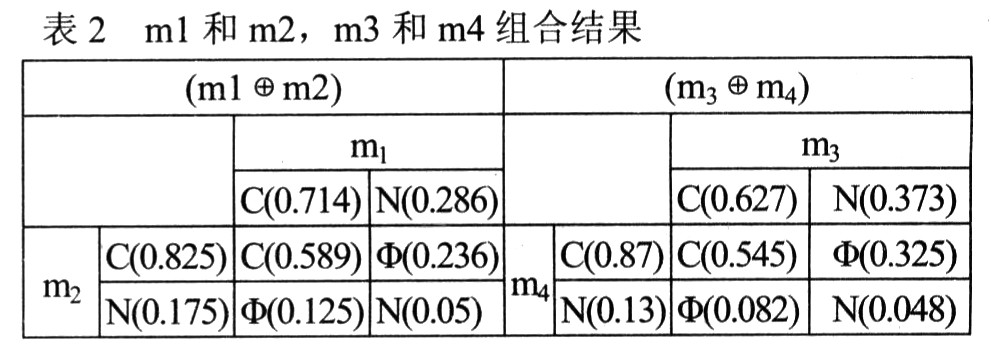
由表2可以得到m1和m2,m3和m4两个证据的不一致因子,分别用k1,k2表示。则kl,k2为:k1=0.236+0.125=0.361:k2=0.325+0.082=0.407计算得到两个基本信度m1和m2融合后的基本信度分配(用m12表示),m3和m4融合后的基本信度分配(用m34表示)为:

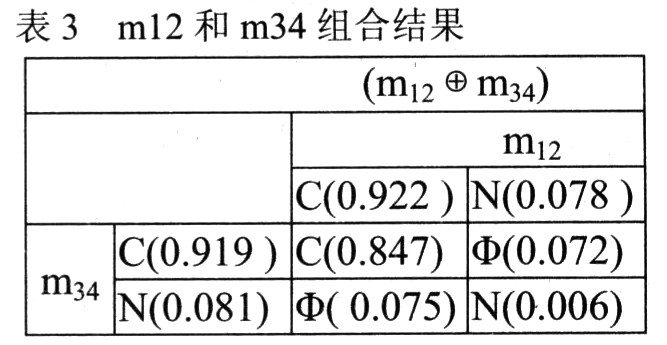
最后再对得到两个基本信度m12和m34融合,基本信度分配(用m1234表示),见表3。
则有:k=0.072+0.075=0.147
m1234(C)=0.847/(1-k)≈0.99
由结果可知,通过融合后粮情变化的基本信度为0.99,故可以明显地判断出该区域的粮情变化很大,发生霉变、虫害的可能性较高。
4 结论
本文通过对小麦仓储过程中的传感器信息选取合适的特征和计算所对应的特征统计量,应用少量的传感器,借助虚拟多传感器的技术以及D-S证据理论融合算法,能够在粮情监测中完成目标识别,并对小麦仓储过程中所发生的不良变化,及时发出预警信息,以确保小麦储藏安全。
通过以上方法将温湿度、图像数据经过变换,得到具有不同特性的虚拟多传感器信息。利用D-S证据理论进行信息融合,D-S证据理论是由Dempster提出来的用概率上下限来表示实际问题中的不确定性,后来通过ShaRer进一步发展成为系统化、理论化的不确定性推理理论。由于篇幅有限,在此只给出部分信息融合过程。
通过实际测量的数据,经过计算得到某一区域的四个虚拟传感器信度值m1,m2,m3,m4如表l,用C表示可信度,N表示不可信度。
按照Dempster组合公式将m1和m2,m3和m4组合,结果如表2所示,其中φ表示空集。
由表2可以得到m1和m2,m3和m4两个证据的不一致因子,分别用k1,k2表示。则kl,k2为:k1=0.236+0.125=0.361:k2=0.325+0.082=0.407计算得到两个基本信度m1和m2融合后的基本信度分配(用m12表示),m3和m4融合后的基本信度分配(用m34表示)为:
最后再对得到两个基本信度m12和m34融合,基本信度分配(用m1234表示),见表3。
则有:k=0.072+0.075=0.147
m1234(C)=0.847/(1-k)≈0.99
由结果可知,通过融合后粮情变化的基本信度为0.99,故可以明显地判断出该区域的粮情变化很大,发生霉变、虫害的可能性较高。
4 结论
本文通过对小麦仓储过程中的传感器信息选取合适的特征和计算所对应的特征统计量,应用少量的传感器,借助虚拟多传感器的技术以及D-S证据理论融合算法,能够在粮情监测中完成目标识别,并对小麦仓储过程中所发生的不良变化,及时发出预警信息,以确保小麦储藏安全。
传感器 相关文章:
- 多核及虚拟化技术在工业和安全领域的应用(05-23)
- 基于ARM核的AT75C220及其在指纹识别系统中的应用(05-24)
- 基于音频信号的轴承故障诊断方法(03-17)
- 采用信号调理IC驱动应变片电桥传感器(05-26)
- 基于nRF2401智能无线火灾监控系统设计(04-01)
- 家居安防无线监控报警系统(04-02)