“反电动势法”永磁直流无刷电机控制系统设计
时间:12-07
来源:互联网
点击:
3 系统软件设计
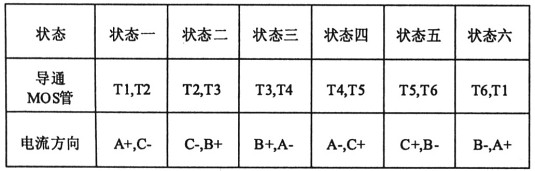
MCU输出控制信号控制三相全桥驱动逆变电路,在软件实现上可以采用不同的控制规律,常用的控制方式有:三三导通控制方式,两三轮流导通控制方式和1200导通型控制方式。它们在控制性能上相差不大,本系统采用1200导通型控制方式,控制规律为:(1)每隔600换流一次;(2)任何时候只有两只开关器件同时导通;(3)每个开关器件导通1200根据硬件电路的设计和1200导通型控制规律,桥臂与MOS管对应关系为:A上桥臂:Tl,A下桥臂:T4;B上桥臂:T3,B下桥臂:T6;C上桥臂:T5,C下桥臂:T2。各MOS管导通顺序如表2所示。
表2MOS管导通规律
采用反电动势法控制直流无刷稀土电机,在起动时,由于电机转速很小,无法获得反电动势,因此电机起动顺利完成要通过软件编程实现。常用的起动方式有:外同步驱动起动方式和预定位起动方式。外同步驱动方式指以变频方式同步拖动电机转子旋转,这种起动方式的缺点是转子的旋转方向是不可知的,转子可能顺时针旋转也可能逆时针旋转;另外,如果频率上升太快,电机很容易失步。预定位方式起动是在起动开始时给电机一个确定的通电状态,使转子定位。然后改变电机的通电状态,在电磁力矩的作用下使转子向确定方向转动,在转动过程中把电机切换到无刷电机运行方式。这样,一方面使绕组中具有一定大小的反电势信号,另一方面电动势的相序是固定的而非随机的,保证电机有一个确定的转向,实现电机的顺利起动。
4 总结
采用以上分析设计的控制方案控制直流无刷稀土电机,实现了反电动势法无传感器控制方式。同时采用两个电流保护模块,一个从硬件上实现保护,一个从软件方面设计实现保护,使得电机在外电路过流与直通发生时能更好的保护整个控制系统的安全运行,相比较于只采用硬件保护电路或软件保护的反电动势控制方法更加灵活安全。还特别的加入了逻辑保护电路模块使得在软件出现问题时能保护驱动电路和电机的安全。整个系统在分析设计方面还有改进的空间,希望其他读者能从以下方面进行改进。
(1)更好的解决反电动势虚假过零点问题。
(2)有待研究更快更好的启动方法。
MCU输出控制信号控制三相全桥驱动逆变电路,在软件实现上可以采用不同的控制规律,常用的控制方式有:三三导通控制方式,两三轮流导通控制方式和1200导通型控制方式。它们在控制性能上相差不大,本系统采用1200导通型控制方式,控制规律为:(1)每隔600换流一次;(2)任何时候只有两只开关器件同时导通;(3)每个开关器件导通1200根据硬件电路的设计和1200导通型控制规律,桥臂与MOS管对应关系为:A上桥臂:Tl,A下桥臂:T4;B上桥臂:T3,B下桥臂:T6;C上桥臂:T5,C下桥臂:T2。各MOS管导通顺序如表2所示。
表2MOS管导通规律
采用反电动势法控制直流无刷稀土电机,在起动时,由于电机转速很小,无法获得反电动势,因此电机起动顺利完成要通过软件编程实现。常用的起动方式有:外同步驱动起动方式和预定位起动方式。外同步驱动方式指以变频方式同步拖动电机转子旋转,这种起动方式的缺点是转子的旋转方向是不可知的,转子可能顺时针旋转也可能逆时针旋转;另外,如果频率上升太快,电机很容易失步。预定位方式起动是在起动开始时给电机一个确定的通电状态,使转子定位。然后改变电机的通电状态,在电磁力矩的作用下使转子向确定方向转动,在转动过程中把电机切换到无刷电机运行方式。这样,一方面使绕组中具有一定大小的反电势信号,另一方面电动势的相序是固定的而非随机的,保证电机有一个确定的转向,实现电机的顺利起动。
4 总结
采用以上分析设计的控制方案控制直流无刷稀土电机,实现了反电动势法无传感器控制方式。同时采用两个电流保护模块,一个从硬件上实现保护,一个从软件方面设计实现保护,使得电机在外电路过流与直通发生时能更好的保护整个控制系统的安全运行,相比较于只采用硬件保护电路或软件保护的反电动势控制方法更加灵活安全。还特别的加入了逻辑保护电路模块使得在软件出现问题时能保护驱动电路和电机的安全。整个系统在分析设计方面还有改进的空间,希望其他读者能从以下方面进行改进。
(1)更好的解决反电动势虚假过零点问题。
(2)有待研究更快更好的启动方法。
传感器 霍尔传感器 神经网络 电路 电流 PWM 逆变器 电压 MOSFET IGBT 电容 单片机 电阻 比较器 MCU 相关文章:
- 多核及虚拟化技术在工业和安全领域的应用(05-23)
- 基于ARM核的AT75C220及其在指纹识别系统中的应用(05-24)
- 基于音频信号的轴承故障诊断方法(03-17)
- 采用信号调理IC驱动应变片电桥传感器(05-26)
- 基于nRF2401智能无线火灾监控系统设计(04-01)
- 家居安防无线监控报警系统(04-02)