CANopen协议在伺服电机控制系统中的实现
时间:12-04
来源:互联网
点击:
| 除了上述用于实现伺服电机模块预定义功能的报文外,还根据CANopen协议的指示灯规范设计了状态(绿色)和错误(红色)指示灯,通过定时器周期性地检查CAN总线状态寄存器和CANopen通信状态标志,设置指示灯的常亮、闪亮和闪烁等状态,可使用户直观地判断当前机器所处的状态,从而提高工作效率,具体的CANopen协议和指示灯规范可以参考相关文档。 | |
| 伺服电机控制模块的设计是基于CANopen协议对象字典的模块化设计,它可以方便地进行功能扩展,只须修改对象字典中报文映射参数,添加相应的功能模块即可实现。与以往的基于CAN数据传送协议相比,大大提出了系统效率,节约了有限的硬件资源,为功能的扩展和用途的延伸提供了方便。 | |
| (2)应用程序流程 | |
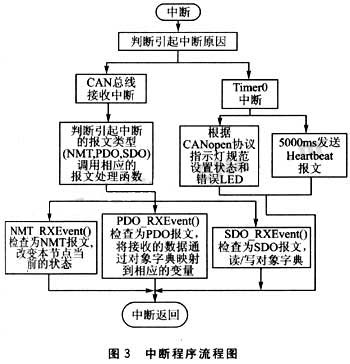
| 伺服电机模块上电以后,根据CANopen协议从节点的性质,系统在进行完初始化参数配置后,发送Boot-up报文通知主节点已进入预操作(preoperational)状态,并在主循环中等待各种类型中断的到来,在预操作状态中,可接收主节点的SDO报文读/写对象字典。比如当无法使DA零点输出偏置电压达到标准值时,可以通过修改对象字典的电压偏置值相来进行调整。NMT报文也可在预操作状态中接收,用于改变节点状态,进入伺服电机模块实时传输PDO报文的操作(operational)状态,开始系统的正常工作,一旦系统进入预操作状态,就会以5000ms为周期发送Heartbeat报文使主节点实时监控伺服电机模块的状态,当从节点发生错误时主节点就可以立刻采取措施,实现实时在线监控的功能,图3为中断程序流程图。 | |
 | |
| (3)基于PIC18F258微控制器的邮箱动态分配的实现 | |
| 邮箱动态分配的任务是在不固定某个邮箱具体特性的同时,实现对邮箱中报文作用的判断,通过邮箱的动态分配,可以节约系统资源,提高软件灵活性,便于今后系统扩展。 | |
| 在系统初始化过程中,实现了邮箱的动态分配,具体方法是:PIC18F258微控制器具有2个接收缓冲器和6个接收滤波器,其中:接收缓冲器0对应于接收滤波器0和1;接收缓冲器1对应于接收滤波器2、3、4和5。通过定义常数标志数组_uCANRxHndls[ i](0≤i≤5),依次将要接收的报文COB-ID定义到接收滤波器中,当产生CAN总线接收中断时,根据中断标志寄存器PIR3的Bit0(RXB0IF,接收缓冲器0中断标志位)和Bit1(RXB1IF,接收缓冲器1中断标志位)来判断产生中断的接收缓冲器。 | |
| 当接收缓冲器0中断时,则有: | |
| _uCAN_ret=*(_uCANRxHndls+(RXB0CON&0x01)) (1) | |
| 其中:_uCAN_ret为标识某报文接收中断数组常数标志;接收缓冲器0控制寄存器(RXB0CON)的Bit0为接收滤波器0、1的选择位。 | |
| 接收缓冲器1中断时,则有: | |
| _uCAN_ret=*(_CANRxHndls+(RXB1CON&0x07)) (2) | |
| 其中:接收缓冲器1控制寄存器(RXB1CON)的Bit2-Bit0为接收滤波器2、3、4和5的选择位。 | |
| 通过式(1)和式(2)可得代表某种报文中断的数组常数标志,实现对接收报文类型的判断,完成邮箱动态分配和相应报文处理。 | |
| 4 实验验证 | |
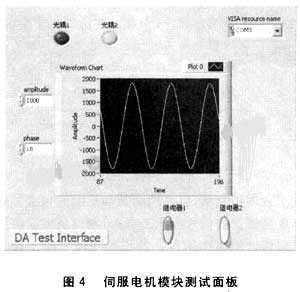
| 为方便实现实验室监测,直观地观察伺服电机模块的工作状态,判断D/A转化的线性特征,使用LabView软件设计了PC监控面板,如图4所示。 | |
 | |
| [table] |
图4中的amplitude和phase分别用于设置发送正弦波的幅度和相位,正弦波数据以占用两字节的形式发送,结合继电器1和2占用的一个字节组成3字节的TPDO报文,光耦1、2表示从RPDO报文接收到的数据状态,在此监控面板的基础上,使系统的调试更加方便。
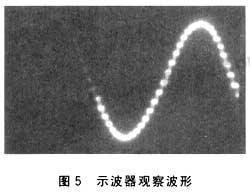
在示波器上观察到的D/A输出波形如图5所示,因为D/A输出为瞬间波形,所以在示波器上看到的波形光线只有一部分。此外,由于LabView软件的限制,最高输出数据周期只能达到1ms,因此,在示波器上看到的波形有折线存在,每个转折点代表一个输出点,通过设置相位值来决定转折点的个数,即输出多少个数据来表示一个波形,例如图5中的相位为18,则会输出36个点来表示一个周期波形。将此D/A输出至伺服控制器即可实现对伺服电机的控制,这一点已在现场试验中得到验证。
[table]
5 结论
通过对并条机自调匀整系统的其他控制节点采用相同的方法进行CANopen协议开发,实现了网络化的控制系统。除了伺服电机外一个完整的控制系统还应有:主控模块如(DSP或单片机)、PLC模块和键盘显示模块等。和伺服电机模块一样,可将每个控制模块都作为一个节点进行开发。每个节点都有各自的节点ID,所接收和发射的数据在总线上进行交流,通过改变伺服电机控制的低速罗拉转速来调节牵伸倍数,从而达到自调匀整的目的。
自动控制系统的网络化,标准化是现代工业发展的一个必然趋势,将CAN总线应用层协议CANopen应用于该领域有着广阔的应用前景,本文通过将伺服电机控制模块做成符合CANopen协议的标准化装置,并应用于并条机自调匀整系统中,使其具有了即插即用和在线监控特性,增强了设备的可扩展性,提高了数据传输的可靠性。这种基于现场总线应用层标准的协议的开发和使用,对提高系统的工作效率,特别是对复杂系统的研制具有一定的指导意义。
总线 自动化 CAN总线 Microchip PIC 单片机 ADI 电压 电路 放大器 继电器 LED 收发器 滤波器 示波器 DSP PLC 相关文章:
- 一种新型防伪读码器的设计(01-01)
- 基于ARM与DSP的嵌入式运动控制器设计(04-25)
- 基于ARM核的AT75C220及其在指纹识别系统中的应用(05-24)
- 基于nRF2401智能小区无线抄表系统集中器设计(04-30)
- 基于FPGA安全封装的身份认证模型研究(05-27)
- 高精度压力测控系统的试验研究(04-08)