基于C167CS微控制器的数字化电梯系统
时间:08-03
来源:互联网
点击:
4. 2 CAN通讯的实现
CAN 是一种新型的总线式串行通信网络,具有突出的实时性、灵活性和可靠性等优点, 可以很好地解决通讯问题。CAN通信具有如下的特点:CAN网络上的任一节点均可在任意时刻发送信息,同时接收总线上的信息,无主从之分; 网络上的节点信息分成不同的优先级,可满足不同的实时要求, 当多点同时向总线发送报文时,优先级较低的节点会主动退出发送,而优先级高的节点可以不受影响地继续发送数据,大大节省了总线冲突仲裁时间,增强了网络的实时性; 采用短帧传送, 每帧信息都有CRC校验及其他检错校验,可靠性高,直接通信能力可达最远10 km,速度可达1 Mbit/ s。可见,由于CAN的多主结构在实时性、灵活性、可靠性等方面具有的突出优点, 非常适合电梯呼梯信号的通信。
4. 2. 1 CAN接口设计
为了实现基于CAN的数据通信, 必须将各控制器的输入、输出转化为CAN标准。由于微控制器本身都带有两个CAN模块,因此只需选择CAN收发器即可。CAN总线的收发器采用 TJA1040 ,它是完全符合ISO 11898标准的控制器局域网CAN协议控制器和物理总线之间的接口, 速度可达1Mbaud。它有优秀的EMC性能,而且在不上电状态下有理想的无源性能,它还提供低功耗管理,支持远程唤醒。C167CS上的CAN模块通过一条串行数据输出线(CAN- TxD)和一条串行数据输入线(CAN-RxD) 连接到收发器。而收发器则通过它的两个有差动接收和发送能力的总线终端CANH和CANL连接到总线线路, 收发器使用5 V的额定电源电压。
4. 2. 2 帧格式的形式
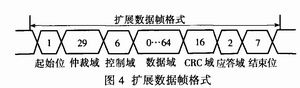
CAN的实际通信是由硬件来自动实施的,硬件是按信息帧格式(主要有数据信息帧和远程信息帧) 来传递数据的。总线传送数据按信息帧来传送, 帧与帧之间由3个分离位来分离, 没有信息帧时,总线则处于空闲时间。数据信息帧的格式如图4 所示(扩展模式) 。
4. 2. 3 CAN控制实现
本系统中, 各控制节点信号传输时以扩展数据帧格式打包,以报文为单位进行数据传输。帧起始部分发送节点标识符并与其优先级相对应,其值越小,优先级越高,总线依据节点标识符进行仲裁,以协调对网络介质的访问。当多个节点同时向总线发送信息时, 优先权低的节点会主动退出发送, 而优先权高的节点可不受影响继续传输数据。数据场中的发送数据存贮在发送缓存器的数据区中,而接收的数据则被存在接收缓存器中。
主控制器CAN节点发送的是指派相应最优电梯轿厢运行方向和周边设备的启动信号;接收的数据是楼层召唤、轿内信号、门系统信号及称重信号等。楼层CAN节点发送的j 是楼层召唤信号;接收的是轿厢运行方向和相应的楼层。轿厢CAN 节点发送的是轿内信号; 接收的是轿厢运行方向和楼层信号。
在系统中,主控制器有最小的标识符,其余各控制器的优先级依重要性排列。CAN节点接收与发送数据均通过中断执行,在进入中断服务程序后,根据中断标志转入接收中断、发送中断、出错中断和唤醒中断。各节点设置节点状态字,主控制器定期查询其他节点状态字, 如发现有状态故障, 则系统报警, 并进行相应处理并恢复,使系统返回正常工作。
5 结论
系统中的电梯群控算法采用基于多规则加权的模糊控制算法, 提高了系统的运行效率。基于CAN 总线的多主结构来实现各控制器间的串行通信,使得任一控制器所采集的信号对其他控制器完全实时共享, 利于实时控制, 同时使整个系统有良好的扩展能力。串行通信的使用简化了传统电梯通信的信号线, 大大方便了安装与维修, 提高了系统的稳定性。高性能微控制器的使用,也使系统的灵活性与可靠性得到了加,有良好的推广价值。(李炳宇 梁正峰 赵昂)
CAN 是一种新型的总线式串行通信网络,具有突出的实时性、灵活性和可靠性等优点, 可以很好地解决通讯问题。CAN通信具有如下的特点:CAN网络上的任一节点均可在任意时刻发送信息,同时接收总线上的信息,无主从之分; 网络上的节点信息分成不同的优先级,可满足不同的实时要求, 当多点同时向总线发送报文时,优先级较低的节点会主动退出发送,而优先级高的节点可以不受影响地继续发送数据,大大节省了总线冲突仲裁时间,增强了网络的实时性; 采用短帧传送, 每帧信息都有CRC校验及其他检错校验,可靠性高,直接通信能力可达最远10 km,速度可达1 Mbit/ s。可见,由于CAN的多主结构在实时性、灵活性、可靠性等方面具有的突出优点, 非常适合电梯呼梯信号的通信。
4. 2. 1 CAN接口设计
为了实现基于CAN的数据通信, 必须将各控制器的输入、输出转化为CAN标准。由于微控制器本身都带有两个CAN模块,因此只需选择CAN收发器即可。CAN总线的收发器采用 TJA1040 ,它是完全符合ISO 11898标准的控制器局域网CAN协议控制器和物理总线之间的接口, 速度可达1Mbaud。它有优秀的EMC性能,而且在不上电状态下有理想的无源性能,它还提供低功耗管理,支持远程唤醒。C167CS上的CAN模块通过一条串行数据输出线(CAN- TxD)和一条串行数据输入线(CAN-RxD) 连接到收发器。而收发器则通过它的两个有差动接收和发送能力的总线终端CANH和CANL连接到总线线路, 收发器使用5 V的额定电源电压。
4. 2. 2 帧格式的形式
CAN的实际通信是由硬件来自动实施的,硬件是按信息帧格式(主要有数据信息帧和远程信息帧) 来传递数据的。总线传送数据按信息帧来传送, 帧与帧之间由3个分离位来分离, 没有信息帧时,总线则处于空闲时间。数据信息帧的格式如图4 所示(扩展模式) 。
4. 2. 3 CAN控制实现
本系统中, 各控制节点信号传输时以扩展数据帧格式打包,以报文为单位进行数据传输。帧起始部分发送节点标识符并与其优先级相对应,其值越小,优先级越高,总线依据节点标识符进行仲裁,以协调对网络介质的访问。当多个节点同时向总线发送信息时, 优先权低的节点会主动退出发送, 而优先权高的节点可不受影响继续传输数据。数据场中的发送数据存贮在发送缓存器的数据区中,而接收的数据则被存在接收缓存器中。
主控制器CAN节点发送的是指派相应最优电梯轿厢运行方向和周边设备的启动信号;接收的数据是楼层召唤、轿内信号、门系统信号及称重信号等。楼层CAN节点发送的j 是楼层召唤信号;接收的是轿厢运行方向和相应的楼层。轿厢CAN 节点发送的是轿内信号; 接收的是轿厢运行方向和楼层信号。
在系统中,主控制器有最小的标识符,其余各控制器的优先级依重要性排列。CAN节点接收与发送数据均通过中断执行,在进入中断服务程序后,根据中断标志转入接收中断、发送中断、出错中断和唤醒中断。各节点设置节点状态字,主控制器定期查询其他节点状态字, 如发现有状态故障, 则系统报警, 并进行相应处理并恢复,使系统返回正常工作。
5 结论
系统中的电梯群控算法采用基于多规则加权的模糊控制算法, 提高了系统的运行效率。基于CAN 总线的多主结构来实现各控制器间的串行通信,使得任一控制器所采集的信号对其他控制器完全实时共享, 利于实时控制, 同时使整个系统有良好的扩展能力。串行通信的使用简化了传统电梯通信的信号线, 大大方便了安装与维修, 提高了系统的稳定性。高性能微控制器的使用,也使系统的灵活性与可靠性得到了加,有良好的推广价值。(李炳宇 梁正峰 赵昂)
继电器 编码器 总线 CAN总线 LED 单片机 收发器 EMC 电压 相关文章:
- 航天器DC/DC变换器的可靠性设计(02-12)
- 基于令牌存储技术的采集器设计与实现(03-18)
- 基于nRF2401智能无线火灾监控系统设计(04-01)
- MSP430在大量程浮子式液位计中的应用(06-20)
- 驱动单线圈保持继电器的电路(07-27)
- 用CMOS-NAND门控制水泵(08-10)