基于GPRS的船载远程监控终端设计
时间:08-02
来源:互联网
点击:
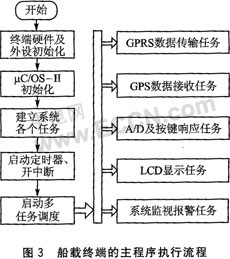 |
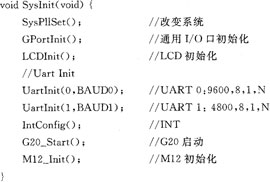
在船载终端软件设计时,首先对ARM微处理器的系统进行上电初始化,即BootLoader代码。这里S3C4480X处理器的BootLoader代码全部放在Init.s文件中,初始化过程主要按照各个任务进行编写。其中在异常向量的实现中,复位异常ResetHandler的实现主要根据本系统实际情况,对存储器、中断、系统时钟频率、异常处理堆栈初始化、中断服务IsrIRQ、C代码运行环境等进行设置和初始化。在完成了BootLoader中所有必要的初始化以后,通过相应的跳转指令进入C语言程序开始执行应用程序的主程序,对船载终端各个任务模块的初始化、μC/OS-II的初始化、定时器启动和μC/OS-II多任务系统启动等。初始化程序如下:
 |
初始化完成后进行任务创建,并启动任务调度。整个终端的各个任务之间的调度关系如图4所示。
 |
系统监视任务优先权最高,最先进入运行态,其他任务处于就绪态。系统监视任务分别查询每一个被监视的任务是否向其发送消息。如果没有,则其进入挂起态。按优先权级别顺序,按键响应任务将由就绪态转为运行状态。在该任务将要执行完毕时,向系统监视中心发送消息,然后执行延肘函数将自身转为挂起状态,交出CPU使用权让其他任务得以执行。此时系统监视任务得到消息转为运行状态,继续查询其他被监视任务的运行消息。GPS数据接收任务和GPRS数据传输任务可以在按键任务延时时间间隔内执行。由于S3C44B0X处理器速度足够快,所有任务得以在满足时序的前提下顺利执行。为了提高船载的安全保障系数,能及时向监控中心报警,设计了一个中断服务子程序,专门用来分析和判断船载的运行状态是否正常。
在整个过程中,监控中心与船载终端之间的通信是通过建立TCP/IP连接来实现的。
4 实验分析及结论
在完成了上述硬件和软件设计的基础上,首先通过船载终端硬件调试、船载终端软件调试验证了设计的硬件、软件系统的可靠性,然后通过终端网络通信实验验证了终端能够实现与上位机进行网络连接并能够正常进行数据接收与发送。通过调试,基于GPRS的船载远程监控系统数据的发送与接收实时性较好,数据处理速度较快,完全满足监控系统实时处理和传输的要求,可以很好地应用于船舶远程监控系统中。
本文研究了基于GPRS的船载远程监控系统终端设计。主要完成了船载监控终端的总体结构设计,并以ARM处理器S3C44B0X为核心,在μC/OS-II嵌入式实时操作系统下,完成了系统的软、硬件设计,实现了船载终端预期的功能,以及船载终端与监控中心的数据通信、GPS信息获取、报警显示等功能。利用该系统可以有效地对水上交通情况进行监控管理,并对水路运输船舶进行合理调度、导航、紧急事故处理、危险报警以及防止违规作业等,为促进我国水上事业的发展提供了有力的保障。
GPS 嵌入式 LCD 电源管理 传感器 ARM 电压 C语言 相关文章:
- 中国研制北斗2系统可压制美GPS军事优势(05-15)
- ADS-B技术及其在空管中的发展与应用(06-21)
- 什么是原子钟(07-04)
- 相对论有没有用?(07-04)
- IEEE 1588是什么?(11-26)
- Q2686无线CPU和LonWorks的无线监控网关设计(01-25)