基于DSP控制的无刷直流电机在电动执行器中的应用
时间:07-27
来源:互联网
点击:
3.3 软件算法
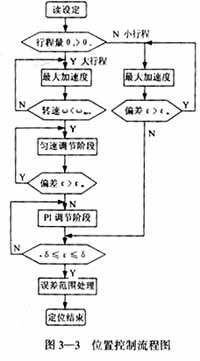
图3—3给出了其中的位置控制流程。在偏差较大的时候,采用能快速纠偏的非线性控制作为开始的粗定位。为了保证精度,在位置偏差进入较小范围内的时候,控制器由非线性控制换成线性控制,从而保证了位置控制的快速性和精确性。
4 试验结果
(1)系统使用的BLDCM特性,它的相电阻R=1.6Ω,相电感L=5.5 mH,在交流输入电压恒定为380V情况下,用调节PWM信号(PWM周期1 ms)的占空比的方式实现BLDCM开环调速,得到的数据见表4—1。
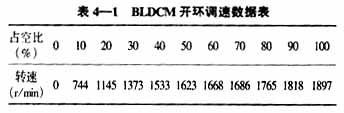
可见,对于转速开环的PWM控制方式,占空比与转速呈非线性关系。
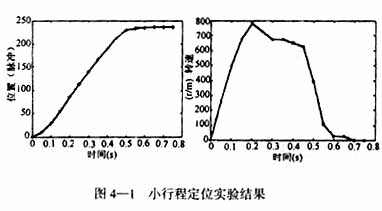
(2)系统小行程实验结果:
初始位置为0,位置给定值为240脉冲(5圈),采集了15组位置、转速值,得到的相应曲线如图4—1所示。
从位置响应曲线分析,整个定位过程只用了约0.6 s,定位过程平稳且没有超调,定位静差为5个脉冲。由于系统静差要求小于全行程的0.5%,而全行程约为200圈,即只要静差在1圈(48个脉冲)内都可满足要求。从转速响应曲线分析,转速在开始阶段上升很快,中间有短暂的近似匀速运行的阶段,定位后期转速降落迅速。这样的转速曲线是很理想的。
5 结语
基于TMS320F240数字信号处理芯片、智能功率模块IPM、无刷直流电动机的智能电动执行器的驱动系统具有以下主要特点:控制电路简单、软件代替硬件、开发速度快、系统运行平稳。
图3—3给出了其中的位置控制流程。在偏差较大的时候,采用能快速纠偏的非线性控制作为开始的粗定位。为了保证精度,在位置偏差进入较小范围内的时候,控制器由非线性控制换成线性控制,从而保证了位置控制的快速性和精确性。
4 试验结果
(1)系统使用的BLDCM特性,它的相电阻R=1.6Ω,相电感L=5.5 mH,在交流输入电压恒定为380V情况下,用调节PWM信号(PWM周期1 ms)的占空比的方式实现BLDCM开环调速,得到的数据见表4—1。
可见,对于转速开环的PWM控制方式,占空比与转速呈非线性关系。
(2)系统小行程实验结果:
初始位置为0,位置给定值为240脉冲(5圈),采集了15组位置、转速值,得到的相应曲线如图4—1所示。
从位置响应曲线分析,整个定位过程只用了约0.6 s,定位过程平稳且没有超调,定位静差为5个脉冲。由于系统静差要求小于全行程的0.5%,而全行程约为200圈,即只要静差在1圈(48个脉冲)内都可满足要求。从转速响应曲线分析,转速在开始阶段上升很快,中间有短暂的近似匀速运行的阶段,定位后期转速降落迅速。这样的转速曲线是很理想的。
5 结语
基于TMS320F240数字信号处理芯片、智能功率模块IPM、无刷直流电动机的智能电动执行器的驱动系统具有以下主要特点:控制电路简单、软件代替硬件、开发速度快、系统运行平稳。
电动机 电子 继电器 DSP 电路 PWM 逆变器 编码器 电流 电压 IGBT 传感器 电阻 电感 相关文章:
- 基于DSP高精度伺服位置环设计(06-21)
- 基于DSP的工业缝纫机控制系统设计(09-23)
- 无传感器交流电动机控制技术提高了运行效率(10-15)
- 一种变频调速系统的SVPWM控制设计(02-03)
- FPGA在步进电机控制中的应用(03-07)
- 用C8051F构成的采集与控制系统(03-09)