基于Itron嵌入式运动控制卡的全电动注塑机应用研究
时间:07-08
来源:互联网
点击:
引言
在国内目前的注塑机行业里,使用液压传动的居多。对注塑机进行全电机化是市场新要求,也是必然趋势。采用伺服系统对注塑机进行全电动化,是现在比较流行的做法。但由于伺服系统成本高,再加之海关税和增值税,使得伺服系统的产品在市场上缺乏价格竞争力。考虑到性价比和现在的技术,选择矢量控制变频器和带有实时操作系统的控制器控制三相交流异步电机,并采用智能控制算法,对注塑机进行全电动化,是一种可行的方案。
采用Itron规格编写的RTOS与其它RTOS相比较,具有效率高、可靠性好、编程容易、移植性强、易于调试、简化通讯标准、高度的开放性、标准化等优点,是世界上工业应用最为广泛的实时操作系统,这表明Itron有潜力变成嵌入式RTOS的世界标准之一。
TH0030A运动控制器及其实时操作系统
嵌入了Itron RTOS运动芯片的运动控制卡TH0030A-MC,主要有两大技术优势:采用Itron规格编写的RTOS和功能强大的PCL6045芯片。
采用Itron规格编写的RTOS和采用Itron规格编写的RTOS具有以下特点。
A) 新内核、可移植性ID,TaskConfig指任务的结构
B) 布局省线
TH0030A-MC所有的信号输入、输出量,都做在几块单独的小板上,而不在主板上。每块小板控制一个轴,有几个轴需要控制,就添加几块小板。每块小板和主板之间的通讯通过一根ARCnet即可实现,省去了大量连线的麻烦,并可保证速度。另外,每块小板可以根据需要被单独地安装在任何位置,而不必考虑和其它小板及主板之间的关系。
C) 多任务
Itron RTOS属于抢占式操作系统,每个任务被分配一定的时间做处理,并有状态表示:“run”、“ready”、“wait”、“suspend”、“wait-suspend”、“dormant”“non-existent”。
D) 人机界面
在TH0030A-MC上,应用Itron规范编写一个log file的任务,配合VB界面,通过以太网通讯,在程序运行的时候,可以方便地在PC上实时监测程序目前执行到什么地方。这样,方便了用户调试自己的程序,也利于数据的检测。
E) 实时性
Itron对于实时性的思路是:嵌入式系统在硬件优化和软件效率之间折衷考虑。Itron规范对应该通过微控制器硬件层次结构标准化的那些特征标志,和应该根据硬件及其功能性质优化的那些成份,都做了明确的区分。影响实时应用中响应时间的那些因素,一般都与作业转换功能和中断处理例行程序有关。Itron规范规定,在规定的高速作业转换时间上,可以将寄存器换出。也可以在发生外部中断时,旁路RTOS启动运行一个中断处理程序。
F) 推广能力
对于把RTOS用在工业实时控制上,Window CE还不够成熟,VxWorks价格太昂贵,Linux实时性太差,Itron则没有它们的缺点,适合推广。
功能强大的PCL6045芯片
对于TH0030A运动卡,用户可自己编写和调用C语言函数对PCL6045芯片上的每个寄存器操作。PCL6045芯片可以同时控制四个轴。它可以对编码器的数值产生倍频;可自行计算速度上升或下降的加速度或S曲线;可设定指令位置、计算机器实际位置、计算偏差位置;可锁住它们的位置;保存外部中断状态、错误中断状态、事件中断状态;可软件重置寄存器:可重置控制位置寄存器或机器位置寄存器等等。它使得对于多轴的位置或速度控制等,变得轻而易举。
TH0030A运动卡的应用
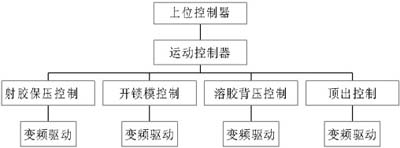
在注塑机这个行业里,控制对象要求高精密(射胶部分)、高响应(保压部分)、安全可靠(锁模部分),故选择TH0030A运动卡。控制系统的结构如图1所示。
上位控制器有三大主要功能:设定控制参数和目标;显示控制结果;协调机器各环节的动作顺序。运动控制器的主要功能是在上位控制器的协调下,完成过程控制,如压力、位置以及速度的控制,并把控制的结果和相关状态传递给上位控制器。具体地,就是实现射胶电机、溶胶电机、开锁模电机和顶出电机的控制。
控制流程可以描述为:由上位控制器发出指令要实现何种控制(例如射胶的速度或压力控制),运动控制器将根据接受到的指令和实际状况,给出控制调节信号至变频器,变频器驱动电机旋转,电机通过永磁皮带与滚珠丝杠相连,将圆周运动转换成直线运动,从而实现速度、压力或位置的控制。
软件程序的基本设计思路如图2所示, 全电注塑机的硬件控制原理框图如图3所示。
在国内目前的注塑机行业里,使用液压传动的居多。对注塑机进行全电机化是市场新要求,也是必然趋势。采用伺服系统对注塑机进行全电动化,是现在比较流行的做法。但由于伺服系统成本高,再加之海关税和增值税,使得伺服系统的产品在市场上缺乏价格竞争力。考虑到性价比和现在的技术,选择矢量控制变频器和带有实时操作系统的控制器控制三相交流异步电机,并采用智能控制算法,对注塑机进行全电动化,是一种可行的方案。
采用Itron规格编写的RTOS与其它RTOS相比较,具有效率高、可靠性好、编程容易、移植性强、易于调试、简化通讯标准、高度的开放性、标准化等优点,是世界上工业应用最为广泛的实时操作系统,这表明Itron有潜力变成嵌入式RTOS的世界标准之一。
TH0030A运动控制器及其实时操作系统
嵌入了Itron RTOS运动芯片的运动控制卡TH0030A-MC,主要有两大技术优势:采用Itron规格编写的RTOS和功能强大的PCL6045芯片。
采用Itron规格编写的RTOS和采用Itron规格编写的RTOS具有以下特点。
A) 新内核、可移植性ID,TaskConfig指任务的结构
B) 布局省线
TH0030A-MC所有的信号输入、输出量,都做在几块单独的小板上,而不在主板上。每块小板控制一个轴,有几个轴需要控制,就添加几块小板。每块小板和主板之间的通讯通过一根ARCnet即可实现,省去了大量连线的麻烦,并可保证速度。另外,每块小板可以根据需要被单独地安装在任何位置,而不必考虑和其它小板及主板之间的关系。
C) 多任务
Itron RTOS属于抢占式操作系统,每个任务被分配一定的时间做处理,并有状态表示:“run”、“ready”、“wait”、“suspend”、“wait-suspend”、“dormant”“non-existent”。
D) 人机界面
在TH0030A-MC上,应用Itron规范编写一个log file的任务,配合VB界面,通过以太网通讯,在程序运行的时候,可以方便地在PC上实时监测程序目前执行到什么地方。这样,方便了用户调试自己的程序,也利于数据的检测。
E) 实时性
Itron对于实时性的思路是:嵌入式系统在硬件优化和软件效率之间折衷考虑。Itron规范对应该通过微控制器硬件层次结构标准化的那些特征标志,和应该根据硬件及其功能性质优化的那些成份,都做了明确的区分。影响实时应用中响应时间的那些因素,一般都与作业转换功能和中断处理例行程序有关。Itron规范规定,在规定的高速作业转换时间上,可以将寄存器换出。也可以在发生外部中断时,旁路RTOS启动运行一个中断处理程序。
F) 推广能力
对于把RTOS用在工业实时控制上,Window CE还不够成熟,VxWorks价格太昂贵,Linux实时性太差,Itron则没有它们的缺点,适合推广。
功能强大的PCL6045芯片
对于TH0030A运动卡,用户可自己编写和调用C语言函数对PCL6045芯片上的每个寄存器操作。PCL6045芯片可以同时控制四个轴。它可以对编码器的数值产生倍频;可自行计算速度上升或下降的加速度或S曲线;可设定指令位置、计算机器实际位置、计算偏差位置;可锁住它们的位置;保存外部中断状态、错误中断状态、事件中断状态;可软件重置寄存器:可重置控制位置寄存器或机器位置寄存器等等。它使得对于多轴的位置或速度控制等,变得轻而易举。
TH0030A运动卡的应用
在注塑机这个行业里,控制对象要求高精密(射胶部分)、高响应(保压部分)、安全可靠(锁模部分),故选择TH0030A运动卡。控制系统的结构如图1所示。
上位控制器有三大主要功能:设定控制参数和目标;显示控制结果;协调机器各环节的动作顺序。运动控制器的主要功能是在上位控制器的协调下,完成过程控制,如压力、位置以及速度的控制,并把控制的结果和相关状态传递给上位控制器。具体地,就是实现射胶电机、溶胶电机、开锁模电机和顶出电机的控制。
控制流程可以描述为:由上位控制器发出指令要实现何种控制(例如射胶的速度或压力控制),运动控制器将根据接受到的指令和实际状况,给出控制调节信号至变频器,变频器驱动电机旋转,电机通过永磁皮带与滚珠丝杠相连,将圆周运动转换成直线运动,从而实现速度、压力或位置的控制。
软件程序的基本设计思路如图2所示, 全电注塑机的硬件控制原理框图如图3所示。
嵌入式 VxWorks Linux C语言 编码器 相关文章:
- 基于ARM与DSP的嵌入式运动控制器设计(04-25)
- 多核及虚拟化技术在工业和安全领域的应用(05-23)
- 基于ARM核的AT75C220及其在指纹识别系统中的应用(05-24)
- 基于FPGA安全封装的身份认证模型研究(05-27)
- 基于nRF2401智能无线火灾监控系统设计(04-01)
- 智能视频多媒体技术的应用(05-31)