一种计算机监控的电力静态模拟试验系统
时间:06-24
来源:互联网
点击:
电力系统静态模拟简称静模,是根据相似性原理建立的一种物理模拟。它利用线路等值阻抗模拟实际线路,用等值电源替代发电机构成模拟系统,可以模拟除系统振荡和发电机电磁暂态过程以外的各种运行状态,包括正常状态和事故状态,从而可以对继电保护和自动装置动作的可靠性进行实验,是教学、科研、保护设备整定校验的得力助手。
当前计算机监控技术在电力系统中得到了广泛的应用,并成为静模技术发展的一个重要方向。静模系统的数据可以由计算机数据采集系统得到,并通过计算机实时处理,而故障的设置及开关操作等经常性的工作可采用计算机进行控制。这就进一步提高了静模系统的灵活性和自动化水平。
1 静模系统的构成及基本功能
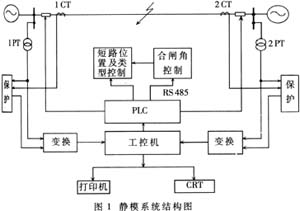
静模系统主要由三大部分构成,即一次模拟系统、智能化监控系统和继电保护装置,其结构见图1。
一次模拟系统主要由双侧电源、模拟线路、断路器、PT(电压互感器)、CT(电流互感器)和控制回路等部分组成,完成一次系统的模拟和手动控制功能。
智能化监控系统主要由模拟量采集模块、开关量采集模块、586工业控制计算机、可编程逻辑控制器(PLC)、执行继电器箱和打印机等部分组成。主要完成以下功能:
(1)采集和处理模拟线路两端电压、电流等模拟量;
(2)模拟线路主接线和运行参数的定时显示及故障数据的存储和分析;
(3)监视两侧断路器位置及各开关量位置,监视保护动作出口的状态;
(4)线路两侧断路器的跳、合闸控制;
(5)在模拟线路的11个短路模拟点上,选定任意一个短路模拟点,设置故障类型、合闸角及故障时间;
(6)控制短路开关(DLABC)的关断。
继电保护装置为微机实现的数字式超高压线路成套快速保护装置。由于装置以短路开关替代机电开关制造短路,所以对于两相以上的并发短路故障的同时性,有了更为精确的实现,其短路角度的任意设置,更为装置的应用提供了宽松的条件。
2 静模系统控制部分的硬件组成
静模系统计算机控制部分实现简单故障的设置、两侧断路器的开关操作和各种开关量的采集及显示等功能。静模系统控制部分硬件结构框图如图2所示。
工控机采用研华公司生产的PRETRUMII工业控制机。
2.2 可编程逻辑控制器?
可编程逻辑控制器采用OMRON新一代产品CQM1,它比较适合于小规模机器控制,可实现高速输入输出应答,包括中断输入处理、间隔时间中断处理,内部高速计数器可实现精确定时、计数以及频率变换等复杂功能。其网络联接有标准RS232、RS485端口与计算机连接,实现与计算机的信息交换。
在本装置中,工控机的控制命令通过RS-232C串口,按照约定好的通讯协议,以串行通讯的方式传送给可编程逻辑控制器(PLC),利用PLC具有逻辑控制、时序控制、计时控制的特点,将这一命令转变成可具体实现的时序控制命令,控制相应的接触器和智能合闸角控制电路,从而完成故障设置或开关操作任务。
2.3 开关量采集板
开关量采集板PC-DIO-24/Pnp是一个24位并行数字输入/输出接口板,可对其进行8位、16位或24位编程,它接于计算机ISA数据总线,具有即插即用功能。在本系统中开关量采集板的24位输入/输出数据位均置输入状态使用。
2.4智能合闸角控制装置
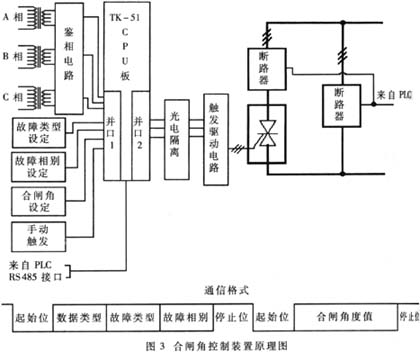
智能合闸角控制装置由TK-51CUP板、电压鉴相电路、RS485串行通信接口、手动合闸角设置开关、光电隔离、触发驱动电路、双向可控硅等7部分组成,如图3所示。
装置的启动合闸方式,可由故障类型、故障相别、合闸角等参数决定。其中故障类型定义为单相、双相、三相接地短路;故障相别分为A、B、C相。由于电压鉴相采用3个独立回路,因此可以方便地实现合闸角的A、B、C相基准任意选择。
合闸角设置定义了手动与自动两种方式。手动设置通过三段式十进制拨码开关实现"0~360度"的任意设定,又用两个单段式十进制拨码开关分别实现故障类型、故障相别的选择,通过手动触发按钮可直接触发双向可控硅,制造短路故障。自动设置由PLC通过RS485总线传送故障类型、故障相别、合闸角以实现方式设置;传送校验采取回送式,即CPU板将接收到的全部指令数据码传回PLC,以便由PLC决定是否重发,如校验无误,即发出触发指令。手动与自动设置的切换采用点按"切换按钮"切换至手动设置,而用PLC对合闸角电路的每次命令刷新将设置切换到自动状态。
3 软件系统
计算机控制系统的软件系统是在Win98环境下,运用Lab Windows/CVI工具软件平台开发的,全部程序用C语言编制而成。Lab Windows/CVI具有良好的图形用户界面开发工具,具有ANSI C编译器和方便的调试环境。主程序框图如图4所示。
当前计算机监控技术在电力系统中得到了广泛的应用,并成为静模技术发展的一个重要方向。静模系统的数据可以由计算机数据采集系统得到,并通过计算机实时处理,而故障的设置及开关操作等经常性的工作可采用计算机进行控制。这就进一步提高了静模系统的灵活性和自动化水平。
1 静模系统的构成及基本功能
静模系统主要由三大部分构成,即一次模拟系统、智能化监控系统和继电保护装置,其结构见图1。
一次模拟系统主要由双侧电源、模拟线路、断路器、PT(电压互感器)、CT(电流互感器)和控制回路等部分组成,完成一次系统的模拟和手动控制功能。
智能化监控系统主要由模拟量采集模块、开关量采集模块、586工业控制计算机、可编程逻辑控制器(PLC)、执行继电器箱和打印机等部分组成。主要完成以下功能:
(1)采集和处理模拟线路两端电压、电流等模拟量;
(2)模拟线路主接线和运行参数的定时显示及故障数据的存储和分析;
(3)监视两侧断路器位置及各开关量位置,监视保护动作出口的状态;
(4)线路两侧断路器的跳、合闸控制;
(5)在模拟线路的11个短路模拟点上,选定任意一个短路模拟点,设置故障类型、合闸角及故障时间;
(6)控制短路开关(DLABC)的关断。
继电保护装置为微机实现的数字式超高压线路成套快速保护装置。由于装置以短路开关替代机电开关制造短路,所以对于两相以上的并发短路故障的同时性,有了更为精确的实现,其短路角度的任意设置,更为装置的应用提供了宽松的条件。
2 静模系统控制部分的硬件组成
静模系统计算机控制部分实现简单故障的设置、两侧断路器的开关操作和各种开关量的采集及显示等功能。静模系统控制部分硬件结构框图如图2所示。

工控机采用研华公司生产的PRETRUMII工业控制机。
2.2 可编程逻辑控制器?
可编程逻辑控制器采用OMRON新一代产品CQM1,它比较适合于小规模机器控制,可实现高速输入输出应答,包括中断输入处理、间隔时间中断处理,内部高速计数器可实现精确定时、计数以及频率变换等复杂功能。其网络联接有标准RS232、RS485端口与计算机连接,实现与计算机的信息交换。
在本装置中,工控机的控制命令通过RS-232C串口,按照约定好的通讯协议,以串行通讯的方式传送给可编程逻辑控制器(PLC),利用PLC具有逻辑控制、时序控制、计时控制的特点,将这一命令转变成可具体实现的时序控制命令,控制相应的接触器和智能合闸角控制电路,从而完成故障设置或开关操作任务。
2.3 开关量采集板
开关量采集板PC-DIO-24/Pnp是一个24位并行数字输入/输出接口板,可对其进行8位、16位或24位编程,它接于计算机ISA数据总线,具有即插即用功能。在本系统中开关量采集板的24位输入/输出数据位均置输入状态使用。
2.4智能合闸角控制装置
智能合闸角控制装置由TK-51CUP板、电压鉴相电路、RS485串行通信接口、手动合闸角设置开关、光电隔离、触发驱动电路、双向可控硅等7部分组成,如图3所示。
装置的启动合闸方式,可由故障类型、故障相别、合闸角等参数决定。其中故障类型定义为单相、双相、三相接地短路;故障相别分为A、B、C相。由于电压鉴相采用3个独立回路,因此可以方便地实现合闸角的A、B、C相基准任意选择。
合闸角设置定义了手动与自动两种方式。手动设置通过三段式十进制拨码开关实现"0~360度"的任意设定,又用两个单段式十进制拨码开关分别实现故障类型、故障相别的选择,通过手动触发按钮可直接触发双向可控硅,制造短路故障。自动设置由PLC通过RS485总线传送故障类型、故障相别、合闸角以实现方式设置;传送校验采取回送式,即CPU板将接收到的全部指令数据码传回PLC,以便由PLC决定是否重发,如校验无误,即发出触发指令。手动与自动设置的切换采用点按"切换按钮"切换至手动设置,而用PLC对合闸角电路的每次命令刷新将设置切换到自动状态。
3 软件系统
计算机控制系统的软件系统是在Win98环境下,运用Lab Windows/CVI工具软件平台开发的,全部程序用C语言编制而成。Lab Windows/CVI具有良好的图形用户界面开发工具,具有ANSI C编译器和方便的调试环境。主程序框图如图4所示。
自动化 电压 电流 PLC 继电器 电路 总线 可控硅 C语言 相关文章:
- 基于ARM与DSP的嵌入式运动控制器设计(04-25)
- 多核及虚拟化技术在工业和安全领域的应用(05-23)
- 基于nRF2401智能小区无线抄表系统集中器设计(04-30)
- 解密波音747飞机中的Sperry垂直陀螺仪(05-06)
- lns构架智能小区安防及关键技术应用研究(06-09)
- 基于MSP430及PROFIBUS的监测子站设计(06-12)