基于CAN总线的潜水电机智能监控系统设计
时间:06-20
来源:互联网
点击:
目前,国内外已有多家公司开发出针对个体潜水电机的智能电了保护装置,虽然可以达到保护电机的目的,但无法实现集中管理。因此,对潜水电机群的实时监控与统一管理的要求日益迫切。本文设计了基于CAN现场总线的潜水电机群分布式智能监控系统,可以对散布的潜水电机保护装置进行组网,实现潜水电机的智能化控制和网络化管理。
潜水电机智能监控系统总体方案设计
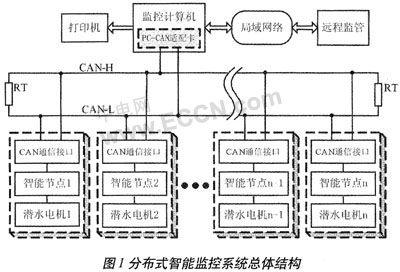
基于CAN现场总线的潜水电机分布式智能监控系统由监控计算机(内置PC-CAN适配卡)、智能节点、CAN总线网络组成,其系统的总体结构如图1所示。分布在现场的监控节点可以独立对电机进行智能控制和故障保护;监控计算机可以通过CAN总线网络和各个监控节点进行实时通信,从而实现潜水电机群的分布式控制和集中临管。
智能节点是整个监控系统的核心部分,它对潜水电机进行智能控制,并对电机在运行过程中出现的过载、过热、渗水、漏水、短路、缺相等故障进行保护。PC-CAN适配卡用来完成CAN总线和监控计算机之间的协议转换,可以选用PCI总线适配卡、ISA总线适配卡或RS-232串行通信适配器。各个智能节点之间通过屏蔽双绞线瓦联构成CAN总线网络,总线两端连接120Ω的阻抗匹配电阻,可以提高系统的稳定性和抗干扰能力。
监控系统的硬件设计
由监控系统的整体结构和功能可知,该系统的硬件设计主要足CAN智能节点的设计。智能节点硬件电路设计采用了模块化结构,由MCU、CAN通信模块、信号采集模块、电机控制模块、状态显示模块、参数设置模块及串行通信接口组成,智能节点的整体结构如图2所示。根据具体情况可以只选用其中的部分模块,增加了监控装置的实用性和经济性。例如:可以去掉显示模块和现场设置模块,利用监控计算机实现数据显示和参数设置的功能。在单机运行时,可以不使用CAN通信模块。
为了简化设计,提高系统的可靠性和性价比,智能节点的主要元器件都是选用同一家公司的产品,包括:微控制器(P89V51RD)、CAN控制器(SJA1000)、CAN收发器(PCA82C250)。P89V51RD内带64kB的Flash存储器,该存储器支持ISP功能,ISP的优点是支持在系统编程,即不需要移出为控制器,只需要通过串行接口(RXT和RXD),结合上位机软件就可以实现PC对MCU的重复编程,而且硬件电路连接简单,这样就方便了程序调试,缩短了设计开发周期,提高了系统的稳定性。现场智能节点各个组成模块的功能如下:
1.CAN通信模块:CAN总线通信接口电路主要由CAN控制器SJA1000、6N137高速光隔、CAN收发器PCA82C250组成。SJA1000完全兼容CAN2.0协议,用来完成物理层和数据链路层的功能,可实现对通信数据的成帧处理,具有多主结构、总线访问优先权、硬件滤波等特点;PCA82C250提供了对CAN总线差动发送和接收数据的功能,有效地提高了总线的抗干扰能力,实现了保护总线、降低射频干扰等功能。为了进一步提高整个系统的可靠性和稳定性,在SJA1000和PCA82C250之间增加了光电隔离器件,并且采用了双电源,有效地抑制由总线引入的干扰。
2.信号采集模块:用来检测电机的运行状态,包括:铂电阻温度传感器、电流互感器、电极式液位传感器。分别用来检测电机三相定子的温度、三相主电流和电机腔内的水位,可以有效地监测潜水电机的过流、过热、缺相、短路、渗漏等异常现象。信号采集模块以12位精度的ADC和多路模拟开关为核心,将传感器采集到的模拟信号进行调理后转变为数字信号并送入微控制器。MCU得到检测信息后做出相应的判断,并送至不同的子程序进行相应的处理,如:把电机运行的温度、电流等信息通过通信程序发送给监控计算机;若出现电机内腔水位过低、温度过高、电流过大,则自动切断本节点的电机、发出声光报警信息,并把节点的停机信息通过CAN总线发送给监控计算机。
3.电机控制模块:MCU判断电机定子温度、电流、液位中的任一项值超出设定值范围时,都会通过SSR(固态继电器)触发相应的异常处理电路,使电机得到保护。
4.参数设置模块:报警电流、报警温度、停机电流、停机温度、节点地址、波特率等信息通过参数设置模块存储于基于X25045的E2PROM中,实现节点工作参数现场设定功能。除了节点地址外,其它的参数也可以通过监控计算机设置。
5.状态显示模块:采用基于I2C总线的显示技术,通过LED数码管实时显示电机运行过程中定子的温度和电流值。并可以在设置模式下显示待定参数的当前值。当电机出现非正常停机时,发光二极管可以指示出故障的类型,方便检查维护。
监控节点的硬件部分除了以上介绍的之外,还有电源电路和看门狗电路。电源电路提供所需隔离电源,用于提高节点的可靠性和安全性;看门狗电路主要保证系统运行的稳定性,在上电、掉电以及警戒情况下复位输出。
潜水电机智能监控系统总体方案设计
基于CAN现场总线的潜水电机分布式智能监控系统由监控计算机(内置PC-CAN适配卡)、智能节点、CAN总线网络组成,其系统的总体结构如图1所示。分布在现场的监控节点可以独立对电机进行智能控制和故障保护;监控计算机可以通过CAN总线网络和各个监控节点进行实时通信,从而实现潜水电机群的分布式控制和集中临管。
|
智能节点是整个监控系统的核心部分,它对潜水电机进行智能控制,并对电机在运行过程中出现的过载、过热、渗水、漏水、短路、缺相等故障进行保护。PC-CAN适配卡用来完成CAN总线和监控计算机之间的协议转换,可以选用PCI总线适配卡、ISA总线适配卡或RS-232串行通信适配器。各个智能节点之间通过屏蔽双绞线瓦联构成CAN总线网络,总线两端连接120Ω的阻抗匹配电阻,可以提高系统的稳定性和抗干扰能力。
监控系统的硬件设计
由监控系统的整体结构和功能可知,该系统的硬件设计主要足CAN智能节点的设计。智能节点硬件电路设计采用了模块化结构,由MCU、CAN通信模块、信号采集模块、电机控制模块、状态显示模块、参数设置模块及串行通信接口组成,智能节点的整体结构如图2所示。根据具体情况可以只选用其中的部分模块,增加了监控装置的实用性和经济性。例如:可以去掉显示模块和现场设置模块,利用监控计算机实现数据显示和参数设置的功能。在单机运行时,可以不使用CAN通信模块。
|

为了简化设计,提高系统的可靠性和性价比,智能节点的主要元器件都是选用同一家公司的产品,包括:微控制器(P89V51RD)、CAN控制器(SJA1000)、CAN收发器(PCA82C250)。P89V51RD内带64kB的Flash存储器,该存储器支持ISP功能,ISP的优点是支持在系统编程,即不需要移出为控制器,只需要通过串行接口(RXT和RXD),结合上位机软件就可以实现PC对MCU的重复编程,而且硬件电路连接简单,这样就方便了程序调试,缩短了设计开发周期,提高了系统的稳定性。现场智能节点各个组成模块的功能如下:
1.CAN通信模块:CAN总线通信接口电路主要由CAN控制器SJA1000、6N137高速光隔、CAN收发器PCA82C250组成。SJA1000完全兼容CAN2.0协议,用来完成物理层和数据链路层的功能,可实现对通信数据的成帧处理,具有多主结构、总线访问优先权、硬件滤波等特点;PCA82C250提供了对CAN总线差动发送和接收数据的功能,有效地提高了总线的抗干扰能力,实现了保护总线、降低射频干扰等功能。为了进一步提高整个系统的可靠性和稳定性,在SJA1000和PCA82C250之间增加了光电隔离器件,并且采用了双电源,有效地抑制由总线引入的干扰。
2.信号采集模块:用来检测电机的运行状态,包括:铂电阻温度传感器、电流互感器、电极式液位传感器。分别用来检测电机三相定子的温度、三相主电流和电机腔内的水位,可以有效地监测潜水电机的过流、过热、缺相、短路、渗漏等异常现象。信号采集模块以12位精度的ADC和多路模拟开关为核心,将传感器采集到的模拟信号进行调理后转变为数字信号并送入微控制器。MCU得到检测信息后做出相应的判断,并送至不同的子程序进行相应的处理,如:把电机运行的温度、电流等信息通过通信程序发送给监控计算机;若出现电机内腔水位过低、温度过高、电流过大,则自动切断本节点的电机、发出声光报警信息,并把节点的停机信息通过CAN总线发送给监控计算机。
3.电机控制模块:MCU判断电机定子温度、电流、液位中的任一项值超出设定值范围时,都会通过SSR(固态继电器)触发相应的异常处理电路,使电机得到保护。
4.参数设置模块:报警电流、报警温度、停机电流、停机温度、节点地址、波特率等信息通过参数设置模块存储于基于X25045的E2PROM中,实现节点工作参数现场设定功能。除了节点地址外,其它的参数也可以通过监控计算机设置。
5.状态显示模块:采用基于I2C总线的显示技术,通过LED数码管实时显示电机运行过程中定子的温度和电流值。并可以在设置模式下显示待定参数的当前值。当电机出现非正常停机时,发光二极管可以指示出故障的类型,方便检查维护。
监控节点的硬件部分除了以上介绍的之外,还有电源电路和看门狗电路。电源电路提供所需隔离电源,用于提高节点的可靠性和安全性;看门狗电路主要保证系统运行的稳定性,在上电、掉电以及警戒情况下复位输出。
总线 CAN总线 电阻 电路 MCU 收发器 射频 传感器 电流 ADC 继电器 LED 二极管 看门狗 滤波器 相关文章:
- 一种新型防伪读码器的设计(01-01)
- 基于ARM与DSP的嵌入式运动控制器设计(04-25)
- 基于ARM核的AT75C220及其在指纹识别系统中的应用(05-24)
- 基于nRF2401智能小区无线抄表系统集中器设计(04-30)
- 基于FPGA安全封装的身份认证模型研究(05-27)
- 高精度压力测控系统的试验研究(04-08)