永磁同步直线电机硬件在环实时仿真平台
时间:05-11
来源:互联网
点击:
物理量 | 定子电阻(
| 直轴电感(H) | 交轴电感(H) | 永磁体磁链(Wb) | 质量 (Kg) | 极对数 | 极距 (m) | 粘滞摩擦系数(N.s/m) | 负载 (N) |
| 数值 | 1.82 | 0.0185 | 0.0178 | 0.279 | 10 | 1 | 0.016 | 0.01 | 843.75 |
3.3 仿真分析
图7给出了两种不同的速度环运行方式,自动方式和手动方式,前者速度给定在0.25m/s周期跳变,后者保持速度给定值0.25m/s不变。从图7中不难发现通过调节速度环、电流环控制器参数为一组合适参数,如表2所示,仿真的直线电机运行速度能够在10ms左右时间内快速跟踪速度给定,且稳态误差在
2um/s内。
表2.速度和电流环控制器参数
| | 速度环 | d轴电流环 | q轴电流环 |
| KP | 1.105 | 16 | 6 |
| KI | 11.397 | 5 | 6 |
A)自动运行方式 B)手动运行方式
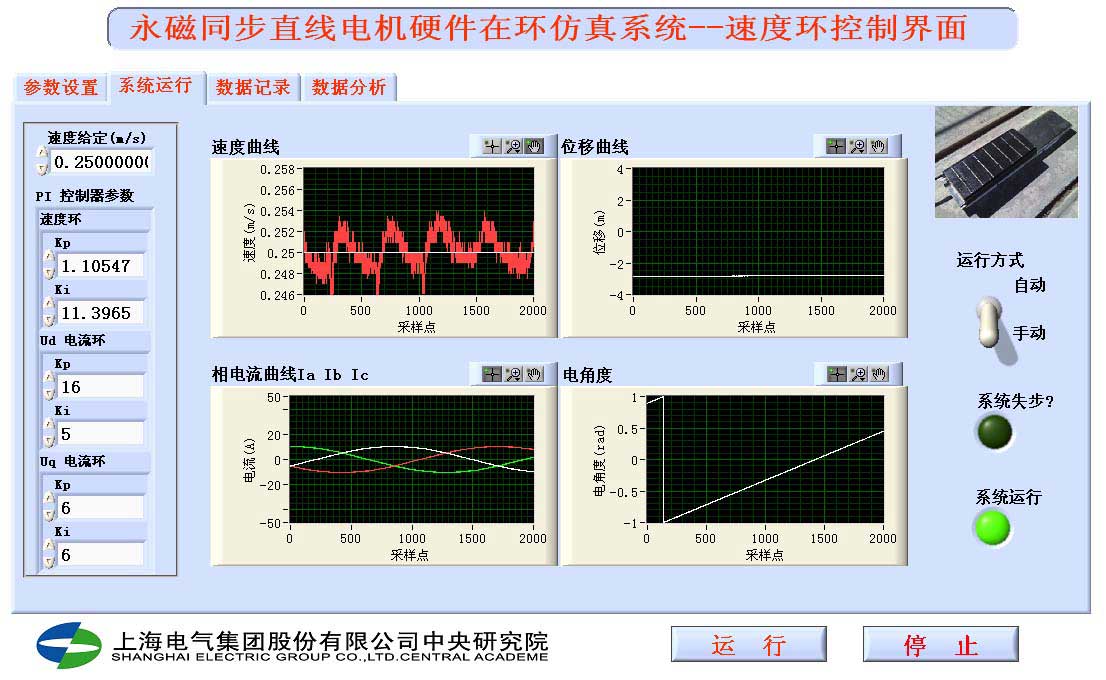
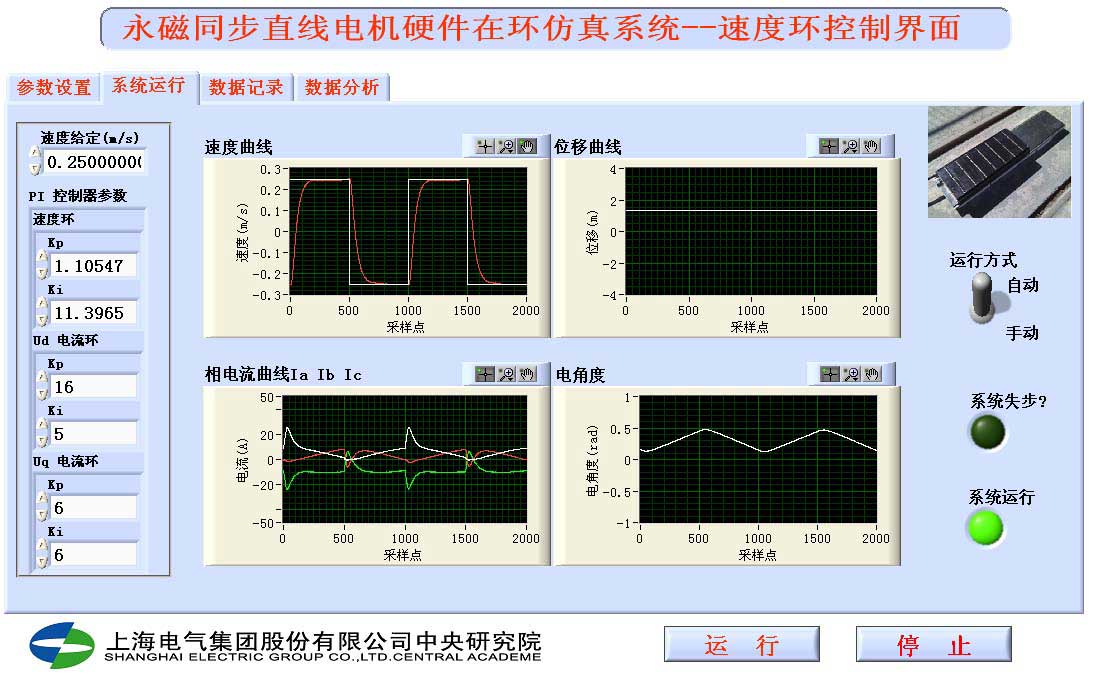
图7永磁同步直线电机速度环控制子程序前面板图
图8给出了直线电机仿真器中的PWM波形图。图中可以明显看出三对正、反相PWM波形的上下沿之间有死区延时,这样可以避免逆变器上下桥臂中的IGBT同时导通,造成逆变器输出电源正、负极短路危险。

图8 带死区延时的PWM波形
图9给出了位置给定值分别为0.25、1.25和3.25m时位置环仿真结果,图中下面的速度曲线对应于上面的位置给定曲线,位置环、速度环和电流环控制器参数如表3所示,位置环界面参见图5。
表3.位置、速度和电流环控制器参数
| 位置环 | 速度环 | d轴电流环 | q轴电流环 |
| KP | 9.5 | 8.304 | 4 | 3 |
| KI | 511.998 | 27.998 | 10 | 6 |
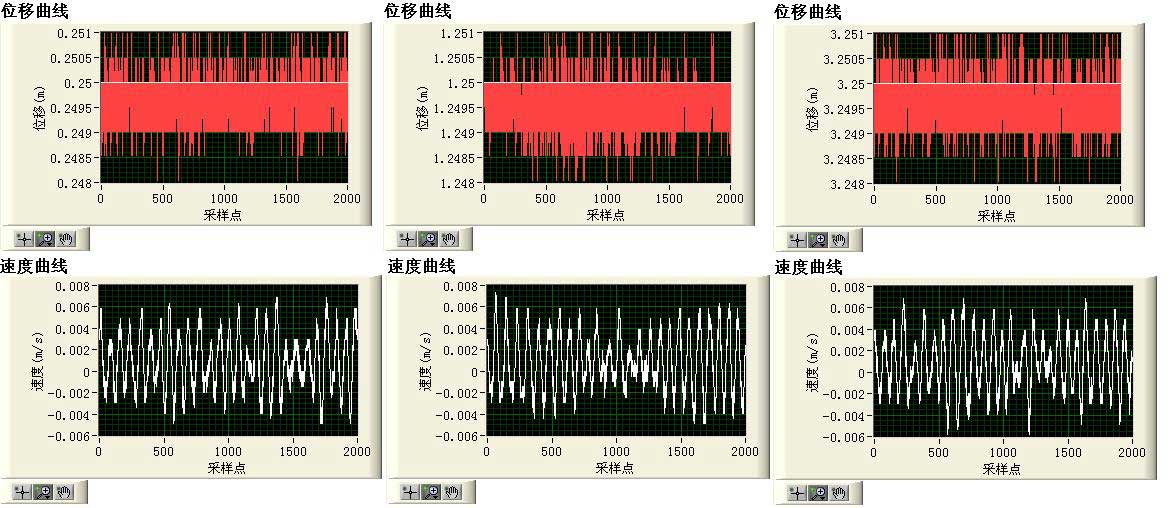
图9 位置给定值、位置跟踪值和速度稳态值
从图9可以得出,在0.25~3.25m较大范围内的位置给定值,系统的位置跟踪误差保持在-1.5~1um之间,且速度稳态值在-0.005~0.007um/s范围内波动,系统达到较为理想的伺服运行状态。本文的直线电机参数均取自于实际直线电机参数,运行结果与科尔摩根系统较为一致,从而验证了本文所提算法的正确性。
四、结论
利用NI公司的虚拟仪器LabVIEW 8.6.1/RT/FPGA、cRIO9074与cRIO9004/9104软硬件平台,在较短的时间内搭建了一套永磁同步直线电机硬件在环实时仿真平台,比采用其它传统软件开发平台缩短了至少1倍以上的开发时间。该平台的成功开发,使得在硬件在环条件下可以事先测试永磁同步直线电机的控制器算法,因而在实际驱动器开发过程中,必将节约成本和缩短研发时间,同时降低事故发生的概率。
作者:上海电气集团股份有限公司中央研究院高级工程师 王振滨
本文获NI公司2009 案例征文大赛单项奖(控制与仿真)
仿真 FPGA 电流 电压 电感 电阻 逆变器 LabVIEW PWM IGBT 虚拟仪器 相关文章:
- ARM在数字化远程视频监控系统的应用(05-20)
- FPGA在弹上信息处理机中的应用(04-15)
- 与MSP430 USI端口配合使用ADS8361(06-18)
- 基于ARM的I2C设备控制方法的实现(06-11)
- 辰汉电子推出低成本快速量产视频监控方案+4路输入方案(06-24)
- 无线IP视频监控应用即将井喷,Blackfin助您赢得先机(07-23)