基于TB6560的步进电机驱动电路设计
时间:03-13
来源:互联网
点击:
引言
步进电机是一种将电脉冲转化为角位移的执行机构。驱动器接收到一个脉冲信号后,驱动步进电机按设定的方向转动一个固定的角度。首先,通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;其次,通过控制脉冲顿率来控制电机转动的速度和加速度,从而达到涮速的目的。目前,步进电机具有惯量低、定位精度高、无累积误差、控制简单等特点,在机电一体化产品中应用广泛,常用作定位控制和定速控制。步进电机驱动电路常用的芯片有L297和L298组合应用、 3977、8435等,这些芯片一般单相驱动电流在2 A左右,无法驱动更大功率电机,限制了其应用范围。本文基于东芝公司2008年推出的步进电机驱动芯片TB6560提出了一种步进电机驱动电路的设计方案。
1 步进电机驱动电路设计
1.1 TB6560简介
TB6560是东芝公司推出的低功耗、高集成两相混合式步进电机驱动芯片。其主要特点有:内部集成双全桥MOSFET驱动;最高耐压40 V,单相输出最大电流3.5 A(峰值);具有整步、1/2、1/8、1/16细分方式;内置温度保护芯片,温度大于150℃时自动断开所有输出;具有过流保护;采用HZIP25封装。TB6560步进电机驱动电路主要包括3部分电路:控制信号隔离电路、主电路和自动半流电路。
1.2步进电机控制信号隔离电路
步进电机控制信号隔离电路如图1所示,步进电机控制信号有3个(CLK、CW、ENABLE),分别控制电机的转角和速度、电机正反方向以及使能,均须用光耦隔离后与芯片连接。光耦的作用有两个:首先,防止电机干扰和损坏接口板电路;其次,对控制信号进行整形。对CLK、CW信号,要选择中速或高速光耦,保证信号耦合后不会发生滞后和畸变而影响电机驱动,且驱动板能满足更高脉冲频率驱动要求。本设计中选择2片6N137高速光耦隔离CLK、CW,其信号传输速率可达到10 MHz,1片TLP521普通光耦隔离ENABLE信号。应用时注意:光耦的同向和反向输出接法;光耦的前向和后向电源应该是单独隔离电源,否则不能起到隔离干扰的作用。
1.3步进电机主电路
如图2所示,步进电机主电路主要包括驱动电路和逻辑控制电路两大部分。
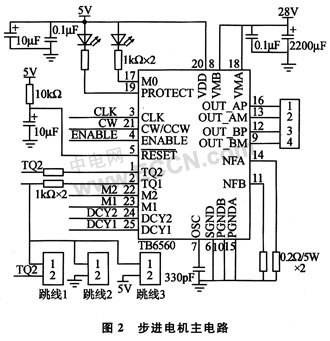
驱动电路电源采用28 V,电压范嗣为4.5~40 V,提高驱动电压可增大电机在高频范围转矩的输出,电压选择要根据使用情况而定。VMB、VMA为步进电机驱动电源引脚,应接入瓷片去耦电容和电解电容稳压。OUT_AP、OUT_AM、OUT_BP、OUT_BM引脚分别为电机2相输出接口,由于内部集成了续流二极管,这4个输出口不用像东芝公司的 8435驱动芯片那样外接二极管,从而极大地减小电路板的布线空间。NFA、NFB分别为电机A、B相最大驱动电流定义引脚,最大电流计算公式为IOUT(A)=0.5(V)/RNF(Ω),若预先定义电机每相的最大驱动电流为2.5 A,取RNF=0.2 Ω,则PGNDA、PGNDB、SGND分别为电机A、B相驱动引脚地和逻辑电源地。
逻辑控制电路电源为5 V,VDD为逻辑电源引脚,应接入去耦电容和旁路电容减小干扰噪声;M0、PROTECT为工作状态和过流保护指示灯;RESET为芯片复位脚,低电平有效;OSC所接电容的大小决定了斩波器频率,推荐100~1 000 pF,斩波频率为400~44 kHz;M2、M1为细分设置引脚,外接拨码开关可设定不同的细分值,如整步、半步、1/8细分、1/16细分。由于步进电机在低频工作时,有振动大、噪声大的缺点,需要细分解决。
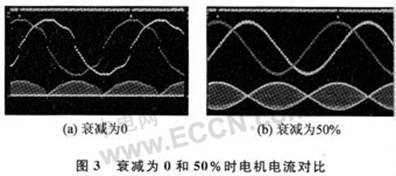
步进电机的细分控制,从本质上讲是通过对步进电机励磁绕组中电流的控制,使步进电机内部的合成磁场为均匀的圆形旋转磁场,从而实现步进电机步距角的细分。一般情况下,合成磁场矢量的幅值决定了步进电机旋转力矩的大小,相邻两合成磁场矢量之间的夹角大小决定了步距角的大小。DCY2、DCY1外接拨码开关设置电流衰减模式(0、25%、50%、100%),用于满足不同的步进电机需要。由于电机本身状况、供电电源状况及脉冲频率等其他因素的影响,步进电机可能会产生高频噪声,通过电流衰减模式的设置可减小甚至消除这种噪声。图3显示了衰减模式为0和50%时线圈电流的变化,可看出波形具有明显的改善。
1.4步进电机自动半流电路
步进电机要减少发热,就要减少铜损和铁损。减少铜损就是减小电阻和电流,要求在选型时尽量选择电阻小和额定电流小的电机,但是这往往与力矩和高速的要求相抵触。对于已选定的电机,首先,应充分利用驱动器的自动半流控制功能和脱机功能,自动半流在电机处于静态时自动减小电流,脱机功能是将输出电机电流切断;其次,细分驱动器由于电流波形接近正弦,谐波少,电机发热也会较少。减少铁损与电机驱动电压有关,高压驱动的电机虽然会带来高速特性的提升,但也带来发热的增加。所以应当选择合适的驱动电压等级,兼顾高速性、平稳性和发热、噪声等指标。
为尽可能减小电机发熟,需要TB6560的TQ2和TQ1引脚电平在电机工作时设置为电流输出最大,在电机不工作时电流减半甚至更小,故称为“自动半流电路”。用NFA、NFB定义最大输出电流后,通过TQ2和TQ1设置电流比率输出,设为00、01、10、11时,输出的电流分别为最大电流的100%、 75%、50%、25%。改变电机的驱动电流,也就改变了电机输出扭矩的大小。自动半流电路设计选用可重复触发的单稳态电路芯片74CH123,用电机的驱动脉冲CLK作为单稳态电路的触发脉冲。单稳态电路的反向输出接TQ2引脚,电机驱动脉冲持续时TQ2一直保持低电平,无驱动脉冲时保持高电平。在图2 电路中,TQ1连接3个跳线帽。接跳线1,TQ2、TQ1始终同为高或低电平,驱动电流在25%~100%切换;接跳线2,TQ2始终为低,电流在 50%~100%切换;接跳线3,电流在25%~75%切换。可根据工作驱动电流需要选择不同跳线。
步进电机是一种将电脉冲转化为角位移的执行机构。驱动器接收到一个脉冲信号后,驱动步进电机按设定的方向转动一个固定的角度。首先,通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;其次,通过控制脉冲顿率来控制电机转动的速度和加速度,从而达到涮速的目的。目前,步进电机具有惯量低、定位精度高、无累积误差、控制简单等特点,在机电一体化产品中应用广泛,常用作定位控制和定速控制。步进电机驱动电路常用的芯片有L297和L298组合应用、 3977、8435等,这些芯片一般单相驱动电流在2 A左右,无法驱动更大功率电机,限制了其应用范围。本文基于东芝公司2008年推出的步进电机驱动芯片TB6560提出了一种步进电机驱动电路的设计方案。
1 步进电机驱动电路设计
1.1 TB6560简介
TB6560是东芝公司推出的低功耗、高集成两相混合式步进电机驱动芯片。其主要特点有:内部集成双全桥MOSFET驱动;最高耐压40 V,单相输出最大电流3.5 A(峰值);具有整步、1/2、1/8、1/16细分方式;内置温度保护芯片,温度大于150℃时自动断开所有输出;具有过流保护;采用HZIP25封装。TB6560步进电机驱动电路主要包括3部分电路:控制信号隔离电路、主电路和自动半流电路。
1.2步进电机控制信号隔离电路
步进电机控制信号隔离电路如图1所示,步进电机控制信号有3个(CLK、CW、ENABLE),分别控制电机的转角和速度、电机正反方向以及使能,均须用光耦隔离后与芯片连接。光耦的作用有两个:首先,防止电机干扰和损坏接口板电路;其次,对控制信号进行整形。对CLK、CW信号,要选择中速或高速光耦,保证信号耦合后不会发生滞后和畸变而影响电机驱动,且驱动板能满足更高脉冲频率驱动要求。本设计中选择2片6N137高速光耦隔离CLK、CW,其信号传输速率可达到10 MHz,1片TLP521普通光耦隔离ENABLE信号。应用时注意:光耦的同向和反向输出接法;光耦的前向和后向电源应该是单独隔离电源,否则不能起到隔离干扰的作用。
1.3步进电机主电路
如图2所示,步进电机主电路主要包括驱动电路和逻辑控制电路两大部分。
驱动电路电源采用28 V,电压范嗣为4.5~40 V,提高驱动电压可增大电机在高频范围转矩的输出,电压选择要根据使用情况而定。VMB、VMA为步进电机驱动电源引脚,应接入瓷片去耦电容和电解电容稳压。OUT_AP、OUT_AM、OUT_BP、OUT_BM引脚分别为电机2相输出接口,由于内部集成了续流二极管,这4个输出口不用像东芝公司的 8435驱动芯片那样外接二极管,从而极大地减小电路板的布线空间。NFA、NFB分别为电机A、B相最大驱动电流定义引脚,最大电流计算公式为IOUT(A)=0.5(V)/RNF(Ω),若预先定义电机每相的最大驱动电流为2.5 A,取RNF=0.2 Ω,则PGNDA、PGNDB、SGND分别为电机A、B相驱动引脚地和逻辑电源地。
逻辑控制电路电源为5 V,VDD为逻辑电源引脚,应接入去耦电容和旁路电容减小干扰噪声;M0、PROTECT为工作状态和过流保护指示灯;RESET为芯片复位脚,低电平有效;OSC所接电容的大小决定了斩波器频率,推荐100~1 000 pF,斩波频率为400~44 kHz;M2、M1为细分设置引脚,外接拨码开关可设定不同的细分值,如整步、半步、1/8细分、1/16细分。由于步进电机在低频工作时,有振动大、噪声大的缺点,需要细分解决。
步进电机的细分控制,从本质上讲是通过对步进电机励磁绕组中电流的控制,使步进电机内部的合成磁场为均匀的圆形旋转磁场,从而实现步进电机步距角的细分。一般情况下,合成磁场矢量的幅值决定了步进电机旋转力矩的大小,相邻两合成磁场矢量之间的夹角大小决定了步距角的大小。DCY2、DCY1外接拨码开关设置电流衰减模式(0、25%、50%、100%),用于满足不同的步进电机需要。由于电机本身状况、供电电源状况及脉冲频率等其他因素的影响,步进电机可能会产生高频噪声,通过电流衰减模式的设置可减小甚至消除这种噪声。图3显示了衰减模式为0和50%时线圈电流的变化,可看出波形具有明显的改善。
1.4步进电机自动半流电路
步进电机要减少发热,就要减少铜损和铁损。减少铜损就是减小电阻和电流,要求在选型时尽量选择电阻小和额定电流小的电机,但是这往往与力矩和高速的要求相抵触。对于已选定的电机,首先,应充分利用驱动器的自动半流控制功能和脱机功能,自动半流在电机处于静态时自动减小电流,脱机功能是将输出电机电流切断;其次,细分驱动器由于电流波形接近正弦,谐波少,电机发热也会较少。减少铁损与电机驱动电压有关,高压驱动的电机虽然会带来高速特性的提升,但也带来发热的增加。所以应当选择合适的驱动电压等级,兼顾高速性、平稳性和发热、噪声等指标。
为尽可能减小电机发熟,需要TB6560的TQ2和TQ1引脚电平在电机工作时设置为电流输出最大,在电机不工作时电流减半甚至更小,故称为“自动半流电路”。用NFA、NFB定义最大输出电流后,通过TQ2和TQ1设置电流比率输出,设为00、01、10、11时,输出的电流分别为最大电流的100%、 75%、50%、25%。改变电机的驱动电流,也就改变了电机输出扭矩的大小。自动半流电路设计选用可重复触发的单稳态电路芯片74CH123,用电机的驱动脉冲CLK作为单稳态电路的触发脉冲。单稳态电路的反向输出接TQ2引脚,电机驱动脉冲持续时TQ2一直保持低电平,无驱动脉冲时保持高电平。在图2 电路中,TQ1连接3个跳线帽。接跳线1,TQ2、TQ1始终同为高或低电平,驱动电流在25%~100%切换;接跳线2,TQ2始终为低,电流在 50%~100%切换;接跳线3,电流在25%~75%切换。可根据工作驱动电流需要选择不同跳线。
步进电机 电路 电流 MOSFET 电压 电容 二极管 电阻 电动机 单片机 嵌入式 相关文章:
- 基于ARM与DSP的嵌入式运动控制器设计(04-25)
- 用MSP430单片机实现微波成像系统的扫描控制与数据采集(06-20)
- 基于可调式模拟激光脉冲的激光告警器在线检测仪(10-20)
- 单片机对仪表步进电机的细分控制(10-20)
- 使用L6506 实现步进电机的电流控制(12-10)
- 基于嵌入式Web服务器的智能温室监控系统(01-25)