基于ARM与DSP的嵌入式运动控制器设计
时间:04-25
来源:互联网
点击:
图2是该平台的X轴驱动原理图[1],Y轴驱动与X轴驱动电路相同。图中M为伺服电机,EC是编码器。将伺服驱动器的“控制模式”设置为“位置 控制”,把指令脉冲设置为CW/CCW方式。S3C2410按流程图操作MCX314As,设置相应的运动参数,写入功能命令,即可完成对平台的运动轨迹 控制。
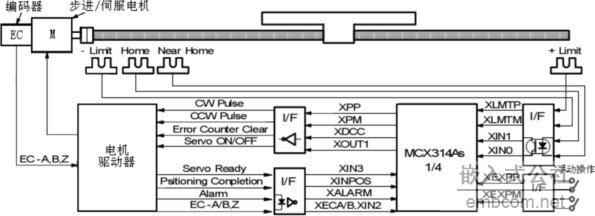
图2 单轴信号驱动系统的接口示意框图
结语
运动控制系统在工业控制中的应用比较广泛,MCX314As是高集成度的运动控制专用芯片能实现四轴三联动的位置、速度、加速度控制和直线、圆弧、位元3种模式的连续插补和位置闭环控制。而ARM处理器具有强大的32位RISC性能,体积小、功耗低。用ARM与专业运动控制芯片设计运动控制器能大大减轻研发任务,加快研发速度,可以在较短时间内得到控制性能优异的嵌入式运动控制系统。
参考文献:
[1] 叶佩青, 汪劲松. MCX314运动控制芯片与数控系统的设计[M], 北京: 北京航空航天大学出版社,2002
[2] 余张国. 基于ARM和MCX314A的嵌入式运动控制器[J],微计算机信息,2005,21卷9-2 ,76-78
[3] SBC2410X使用手册Version0.9. 广州友善之臂科技有限公司
[4] MCX314A, DataSheet, NOVA电子有限公司
[5] S3C2410 DataSheet, 韩国三星公司
嵌入式 ARM DSP 电子 步进电机 自动化 机器人 总线 S3C2410 LCD 电路 编码器 相关文章:
- 多核及虚拟化技术在工业和安全领域的应用(05-23)
- 基于ARM核的AT75C220及其在指纹识别系统中的应用(05-24)
- 基于FPGA安全封装的身份认证模型研究(05-27)
- 基于nRF2401智能无线火灾监控系统设计(04-01)
- 智能视频多媒体技术的应用(05-31)
- ARM在数字化远程视频监控系统的应用(05-20)