基于STM32的红外遥控和解码遥控程序解析
时间:09-13
来源:互联网
点击:
文本主要包含两个内容:一、红外遥控协议的的讲解;二、解码程序解析(参考正点原子的代码)
红外的介绍、优点、缺点就不给大家说了,网上书上都有,下面进入正题
一、红外遥控协议的的讲解
红外遥控的编码目前广泛使用的是:NEC Protocol的PWM(脉冲宽度调制)和Philips RC-5 Protocol的PPM(脉冲位置调制)
本文将以NEC协议实现红外遥控。
NEC协议的特征:
1、8位地址和8位指令长度;
2、地址和命令两次传输(确保可靠性);
3、PWM脉冲宽度调制,以发射红外载波的占空比代表“0”和“1”;
4、载波频率为38KHz;
5、位时间为1.125ms和2.25ms;
NEC 码位的定义:一个脉冲对应560us的连续载波,一个逻辑1传输需要2.25ms(560us脉冲+1680us低电平),一个逻辑0的传输需要 1.125ms(560us脉冲+560us低电平)。而遥控接收头在收到脉冲时为低电平,在没有收到脉冲时为高电平,因此,我们在接收头端收到的信号 为:逻辑1应该是560us低+1680us高,逻辑0应该是560us低+560us高。如下图:

NEC 遥控指令的数据格式为:同步码头(引导码)+地址码+地址反码+控制码+控制反码。同步码是由一个9ms的低电平和一个4.5ms的高电平组成,地址码、 地址反码、控制码、控制反码均为8位数据格式。按照高位在前低位在后的顺序发送。采用反码是为了增加传输的可靠性(可用于校验)。下图是我们按下按键2 时,从红外接收头端测到的波形:
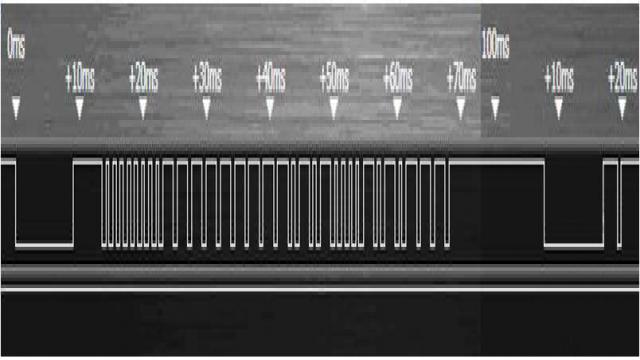
在 图中可以看到,在100ms之后,我们还收到了几个脉冲,这是NEC码规定的连发码(由9ms低电平+2.5ms高电平+0.56ms低电平和 97.94ms高电平组成),如果在一帧数据发送完后,按键仍没有松开,则发送重复码(连发码),可以通过统计连发码的次数来标记按键按下的长短/次数。
二、解码程序解析(参考正点原子的代码)
在正点原子的代码中是利用定时器的输入捕获功能来实现遥控解码的,下面解析一下关键代码:
在该实验remote.h文件中,定义了3个函数:Remote_Init();、TIM4_IRQHandler();、Remote_Scan();。
1、Remote_Init();
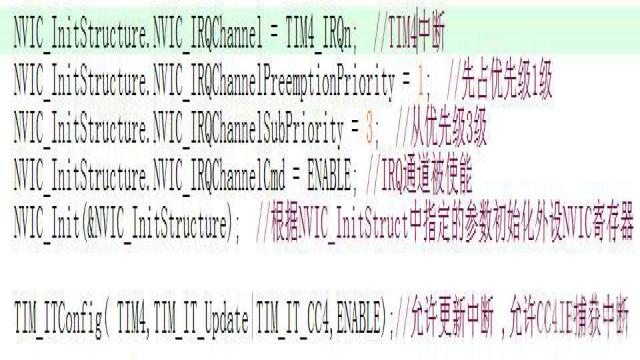
这里要注意中断优先级,定时器4的两个中断,溢出(更新)中断,捕获事件中断的优先级是一样的。意思就是,他两谁也不能打断谁,例如A在执行时,B就不会产生中断。这里很重要,很重要,很重要!
2、TIM4_IRQHandler();
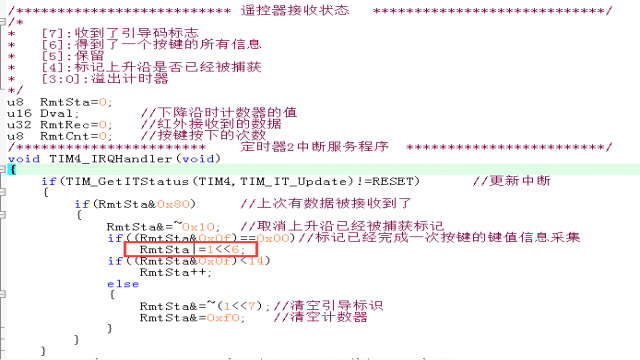
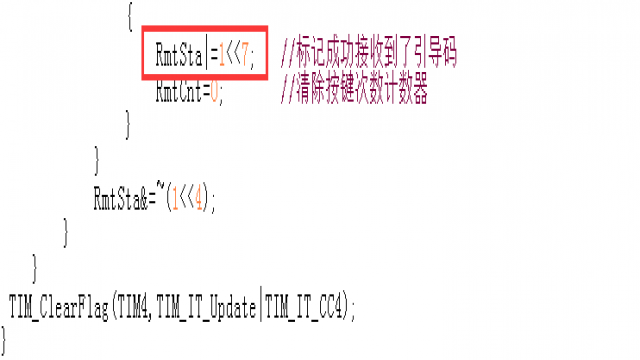
注意上图中画红框的状态标识,下面解析一下此中断服务函数(该终端服务函数中有两个中断,溢出中断和捕获中断):
1、先看捕获中断,Rmtsta刚开始时为0,当发生一次上升沿捕获时(RDATA对应的引脚得到一个高电平),先把捕获事件配置为下降沿捕获,然后Rmtsta=0x10,标记了上升沿已经被捕获;
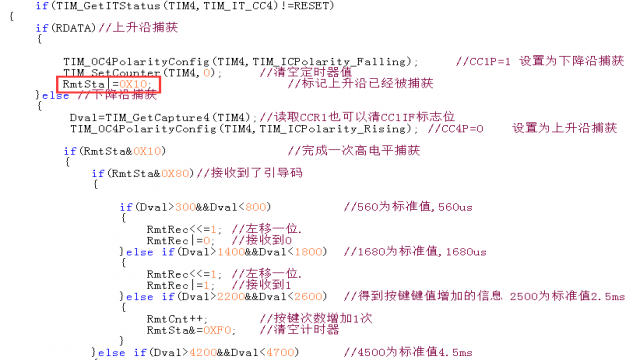
2、当有下降沿到来时,将CCR1寄存器的值赋给Dval变量,并再将捕获事件配置为上升沿捕获;补充:像这样上升沿捕获和下降沿捕获交替使用,是为了捕获到高电平持续时间。
3、注意:只有当接收头收到了引导码后,才进行解码。故先判断Dval的值是不是在4200us~4700us之间,如果在,就将Rmtsta|=1
注意:遥控器发过来的码都是编好的,比如想破解遥控器编码,可以拿示波器去测接收端的码。
整个程序思路不难,就是对遥控器发过来的码进行解码,这里主要是两个中断的理解。
红外的介绍、优点、缺点就不给大家说了,网上书上都有,下面进入正题
一、红外遥控协议的的讲解
红外遥控的编码目前广泛使用的是:NEC Protocol的PWM(脉冲宽度调制)和Philips RC-5 Protocol的PPM(脉冲位置调制)
本文将以NEC协议实现红外遥控。
NEC协议的特征:
1、8位地址和8位指令长度;
2、地址和命令两次传输(确保可靠性);
3、PWM脉冲宽度调制,以发射红外载波的占空比代表“0”和“1”;
4、载波频率为38KHz;
5、位时间为1.125ms和2.25ms;
NEC 码位的定义:一个脉冲对应560us的连续载波,一个逻辑1传输需要2.25ms(560us脉冲+1680us低电平),一个逻辑0的传输需要 1.125ms(560us脉冲+560us低电平)。而遥控接收头在收到脉冲时为低电平,在没有收到脉冲时为高电平,因此,我们在接收头端收到的信号 为:逻辑1应该是560us低+1680us高,逻辑0应该是560us低+560us高。如下图:
NEC 遥控指令的数据格式为:同步码头(引导码)+地址码+地址反码+控制码+控制反码。同步码是由一个9ms的低电平和一个4.5ms的高电平组成,地址码、 地址反码、控制码、控制反码均为8位数据格式。按照高位在前低位在后的顺序发送。采用反码是为了增加传输的可靠性(可用于校验)。下图是我们按下按键2 时,从红外接收头端测到的波形:
在 图中可以看到,在100ms之后,我们还收到了几个脉冲,这是NEC码规定的连发码(由9ms低电平+2.5ms高电平+0.56ms低电平和 97.94ms高电平组成),如果在一帧数据发送完后,按键仍没有松开,则发送重复码(连发码),可以通过统计连发码的次数来标记按键按下的长短/次数。
二、解码程序解析(参考正点原子的代码)
在正点原子的代码中是利用定时器的输入捕获功能来实现遥控解码的,下面解析一下关键代码:
在该实验remote.h文件中,定义了3个函数:Remote_Init();、TIM4_IRQHandler();、Remote_Scan();。
1、Remote_Init();
这里要注意中断优先级,定时器4的两个中断,溢出(更新)中断,捕获事件中断的优先级是一样的。意思就是,他两谁也不能打断谁,例如A在执行时,B就不会产生中断。这里很重要,很重要,很重要!
2、TIM4_IRQHandler();
注意上图中画红框的状态标识,下面解析一下此中断服务函数(该终端服务函数中有两个中断,溢出中断和捕获中断):
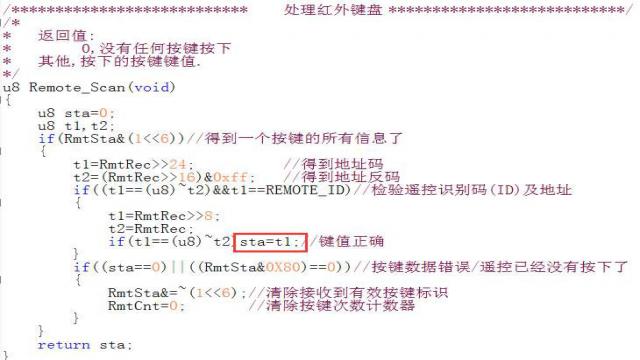
1、先看捕获中断,Rmtsta刚开始时为0,当发生一次上升沿捕获时(RDATA对应的引脚得到一个高电平),先把捕获事件配置为下降沿捕获,然后Rmtsta=0x10,标记了上升沿已经被捕获;
2、当有下降沿到来时,将CCR1寄存器的值赋给Dval变量,并再将捕获事件配置为上升沿捕获;补充:像这样上升沿捕获和下降沿捕获交替使用,是为了捕获到高电平持续时间。
3、注意:只有当接收头收到了引导码后,才进行解码。故先判断Dval的值是不是在4200us~4700us之间,如果在,就将Rmtsta|=1
注意:遥控器发过来的码都是编好的,比如想破解遥控器编码,可以拿示波器去测接收端的码。
整个程序思路不难,就是对遥控器发过来的码进行解码,这里主要是两个中断的理解。
- 基于红外超声光电编码器的室内移动小车定位系统(06-30)
- 基于双Nios II的红外图像实时Otsu局部递归分割算法设计(07-21)
- 红外热成像诊断技术在建筑搂宇的多种应用(03-08)
- 基于ARM9和GSM/GPRS的无线可移动红外监测报警系统(10-15)
- 智能家居系统中自动窗帘控制系统的设计实现(07-05)
- 基于ZigBee与红外的家居监控系统(09-29)