基于红外超声光电编码器的室内移动小车定位系统
引 言
目前,使用超声波技术进行空间测量和定位已相当普遍。有的运用超声波的反射特性,有的综合运用红外和超声波传感器采取三边测距的定位方法,前者因为超声波传输介质的影响使测量精度无法提高,超声波衰减特性使其传播的距离有限,再利用反射特性更加缩短了传播的距离。后者虽然精度有所提高,测量的距离增加了,但是出现了测量盲区的问题,待测目标在某些位置不能同时检测到3个以上的超声波信号时,使系统无法定位。本文在第2种方法的基础上在系统中加入了光电编码器测距定位原理,消除其定位盲区的问题。
1 定位原理
1.1 红外超声三边测距定位原理
首先在室内建立一直角坐标系,规定好原点、X轴、Y轴、和Z轴。在室内上空固定位置设立3个参考点A、B、C,坐标分别为(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3)。使用红外超声系统测出目标点到3个参考点的距离L、M、N为:
由式(1)~式(3)解出目标点的坐标值(x,y,z)。这就是红外超声的定位原理,简单且容易编程实现。下面说明目标点与参考点间距离的测量原理。光速与超声波速度在量级上的极大差值是实现测距功能的基础。测距原理见图1。
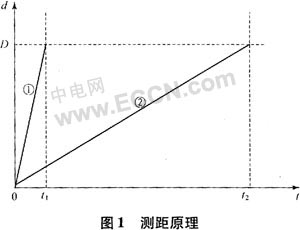
超声波和红外光的传播速度为常量,其传播距离与时间的曲线均为直线,直线斜率即波速,易知曲线①为红外光曲线,曲线②为超声波曲线。指定距离D,设红外光与超声波在0时刻同时从某一参考点出发,红外光经t1时间走完指定距离,超声波经t2时间走完指定距离,则D=vt2,式中v为超声波速。令t=t2-t1,可得D=v(t+t1)。已知红外光速为3×108m/s,超声波在空气中速度为3.4×102m/s,在室内这样的距离范围,近似认为t1=0,得到D=vt。
系统在每个参考点安装单片机控制的红外和超声波发射管,在目标点安装红外和超声波接收管,同样连接单片机。某一时刻参考点发射红外和超声信号,目标点在接收到红外信号时启动单片机的内部计数器、在接收到超声信号时停止计数器,这样二者的时间差t被记录下来,将t与超声波速相乘就得到待测距离D。实际上,信号处理总是有延时的,由此带来的测量误差必须补偿,最终得到算式为:d=vt+n。式中:d为距离测量值;v为超声波速;t为单片机记录的红外光和超声披到达目标点的时间差值;n为系统器件延迟误差补偿项。
1.2 光电编码器测距定位原理
光电编码器是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器,这是目前应用最多的传感器,由光栅盘和光电检测装置组成。
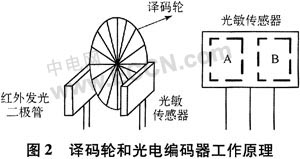
光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光电码盘(称为译码轮,见图2)与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号。发光二极管和光敏传感器组成光电耦合器。光敏传感器内部沿垂直方向排列有2个光敏晶体管A和B。由于译码轮有间隙,故当译码轮转动时,红外发光二极管发出的红外线时而照在光敏传感器上,时而被阻断,从而使光敏传感器输出脉冲信号。光敏晶体管A和B被安放的位置使得其光照和阻断的时间有差异,从而产生的脉冲A和脉冲B有一定的相位差。利用这种方法,就能测出码盘滚轴滚动方向。滚轴每转动一个小角度,车轮位置计数器加1,每隔一定时间,单片机把车轮位置计数器的值读出,通过计算得出车轮移动的位移(当小车转弯时为弧线长度和弧线切线方向),再把位移信息发送给上位机。
基于以上原理,在同轴二轮驱动小车(同轴二轮驱动小车的2个轮子的运行轨迹总是平行的)的2个驱动轮子的正上方一定高度的a、b这2点安装红外超声定位单元,绝对定位每个点的坐标。在2个轮子各自轴上安装光电编码器测距单元,用来测量2个定位时刻点间轮子移动的距离和前进倒退情况。
对移动小车的定位分为3种情况:
a) 在某一定位时刻a、b这2点能够同时检测到3个参考点的信号(地面是平的,进行平面二维定位时只需2个信号),就用红外超声绝对定位方法计算移动小车的位置,计算出它们中点的位置(即移动小车的位置),并根据前一时刻a、b这2点的坐标、2个轮子间的固定距离判断出轮子相对于所建坐标系的运行方向。
b) a、b中只有1点能够同时检测到3个参考点的信号,则根据前一时刻a、b这2点的坐标、光电编码器测得2个轮子的移动距离长短比较、2个轮子间的同定距离计算出移动小车的位置和运行方向。
c) a、b这2点都不能同时检测到3个参考点的信号,则根据前一时刻a、b这2点的坐标、2个轮子的固定距离、光电编码器测得2个轮子的移动距离计算出小车的坐标和运行方向。
- 高带宽嵌入式应用中SoC微控制器的新型总线设计 (02-02)
- 基于微控制器的web服务器设计(07-04)
- 低成本ARM系列LM3S101微控制器的结构与应用(03-28)
- 嵌入式应用中的USB主设备功能(05-11)
- 爱特梅尔低功耗微控制器平台开发组合软件加速设计(02-05)
- 意法半导体安全解决方案强化防盗版功能(11-01)