雷达目标回波数字模拟的TMS320C6201实现
时间:11-25
来源:互联网
点击:
4.2 基于TMS320C6201的实现
由于模拟雷达回波信号有实时性的要求,因此在实现过程中,采用了C语言与汇编语言混合编程的方法,框架程序使用C语言编写,对运行速度要求高的子程序采用汇编语言编写,因此这就涉及到C语言与汇编语言混合编程的接口约定,现将部分接口约定总结如下:
(1)C函数调用汇编程序时,主调C程序会自动保存A0-A9,B0-B9寄存器的值,其余寄存器的值如有必要需人工保存,返回时A0-A9,B0-B9寄存器的值会自动恢复,其余则需人工恢复;
(2)主调C程序进行汇编函数调用时,函数的参数传递遵循以下规则:8/16b参数依次存入A4,B4、A6、B6、A8、B8、A10、B10、A12、B12;如果传递的是长型,双精度等32/64b参数,则将参数存入一对奇偶寄存器对中,如A5:A4,B5:B4,A8:A7等。当需要传递的参数个数多于10个时,则多出的参数置于stack中。
(3)如果C调用函数中做了正确的函数返回声明,则被调用的汇编函数可以返回有效值。如果返回值是整型或32位的浮点型,则放在寄存器A4中返回,如果返回值是双精度或是长双精度型,则放在A5:A4中返回,如果返回值是一个结构类型,则将结构地址放在A3中返回。
(4)任何一个在汇编语言中声明的对象都要使其在C中是可访问的,那么在汇编语言中必须用.def或.global进其声明为外部变量。同样在汇编语言中要引用C函数或对象时,必须用.ref或.global将C对象声明,将这产生一个在汇编语言函数中没有定义的由链接器辨识的外部引用。
图3即为用TMS320C6201实现的目标轨迹之一,将整个系统放在硬件平台上进行调试,可以得到与其要求的目标轨、目标的多普勒频移和天线调制后的目标回波信号振幅。
5 目标通道实现
计算机通过PCI接口卡和模拟器实现数据接口。目标数据存储器采用了高速大容量同步动态存储器(SDRAM),SDRAM映射在TMS320C6201的外部存储器的空间的CE2和CE3空间,EPROM映射在CE1空间,而输入输出双口RAM都映射在CE0空间。
整个工作流程如下:
(1)在主机中根据雷达调试要求设置载机高度、载机速度、雷达载频以及目标的各项参量,预先计算目标数据。
(2)主机通过PCI接口把事先计算好的目标数据送往输入双口RAM,再通过TMS320C6201把输入双口RAM中的数据存入目标SDRAM中。
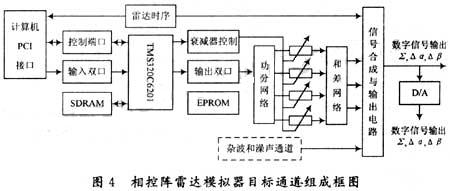
(3)在主机和TMS320C6201将目标数据送入存储器后,TMS320C6201根据下一帧的PRF值,计算目标数据的存放地址,从该地址取出一帧目标数据送往目标幅度输出双口存储器,再由输出双口存储器输出到后级电路,TMS320C6201还要根据当前的波束指向输出衰减器控制数据,对目标信号进行天线方向图调制,形成目标和差信号。
(4)数字、视频输出
信号合成与输出电路将目标、杂波、噪声数据合成得到数字雷达回波信号后直接输出Σ,Δα,Δβ数字信号,视频输出由Σ,Δα,Δβ数字信号经过D/A变换后得到。
6 结语
本文简要介绍了雷达视频模拟的理论,并介绍了C语言和汇编程序混合编程的一些约定,对目标轨迹的模拟进行了分析,基于简单的基本轨迹实现各种复合轨迹,较逼真地复现实际环境中目标的运动。
由于模拟雷达回波信号有实时性的要求,因此在实现过程中,采用了C语言与汇编语言混合编程的方法,框架程序使用C语言编写,对运行速度要求高的子程序采用汇编语言编写,因此这就涉及到C语言与汇编语言混合编程的接口约定,现将部分接口约定总结如下:
(1)C函数调用汇编程序时,主调C程序会自动保存A0-A9,B0-B9寄存器的值,其余寄存器的值如有必要需人工保存,返回时A0-A9,B0-B9寄存器的值会自动恢复,其余则需人工恢复;
(2)主调C程序进行汇编函数调用时,函数的参数传递遵循以下规则:8/16b参数依次存入A4,B4、A6、B6、A8、B8、A10、B10、A12、B12;如果传递的是长型,双精度等32/64b参数,则将参数存入一对奇偶寄存器对中,如A5:A4,B5:B4,A8:A7等。当需要传递的参数个数多于10个时,则多出的参数置于stack中。
(3)如果C调用函数中做了正确的函数返回声明,则被调用的汇编函数可以返回有效值。如果返回值是整型或32位的浮点型,则放在寄存器A4中返回,如果返回值是双精度或是长双精度型,则放在A5:A4中返回,如果返回值是一个结构类型,则将结构地址放在A3中返回。
(4)任何一个在汇编语言中声明的对象都要使其在C中是可访问的,那么在汇编语言中必须用.def或.global进其声明为外部变量。同样在汇编语言中要引用C函数或对象时,必须用.ref或.global将C对象声明,将这产生一个在汇编语言函数中没有定义的由链接器辨识的外部引用。
图3即为用TMS320C6201实现的目标轨迹之一,将整个系统放在硬件平台上进行调试,可以得到与其要求的目标轨、目标的多普勒频移和天线调制后的目标回波信号振幅。
5 目标通道实现
计算机通过PCI接口卡和模拟器实现数据接口。目标数据存储器采用了高速大容量同步动态存储器(SDRAM),SDRAM映射在TMS320C6201的外部存储器的空间的CE2和CE3空间,EPROM映射在CE1空间,而输入输出双口RAM都映射在CE0空间。
整个工作流程如下:
(1)在主机中根据雷达调试要求设置载机高度、载机速度、雷达载频以及目标的各项参量,预先计算目标数据。
(2)主机通过PCI接口把事先计算好的目标数据送往输入双口RAM,再通过TMS320C6201把输入双口RAM中的数据存入目标SDRAM中。
(3)在主机和TMS320C6201将目标数据送入存储器后,TMS320C6201根据下一帧的PRF值,计算目标数据的存放地址,从该地址取出一帧目标数据送往目标幅度输出双口存储器,再由输出双口存储器输出到后级电路,TMS320C6201还要根据当前的波束指向输出衰减器控制数据,对目标信号进行天线方向图调制,形成目标和差信号。
(4)数字、视频输出
信号合成与输出电路将目标、杂波、噪声数据合成得到数字雷达回波信号后直接输出Σ,Δα,Δβ数字信号,视频输出由Σ,Δα,Δβ数字信号经过D/A变换后得到。
6 结语
本文简要介绍了雷达视频模拟的理论,并介绍了C语言和汇编程序混合编程的一些约定,对目标轨迹的模拟进行了分析,基于简单的基本轨迹实现各种复合轨迹,较逼真地复现实际环境中目标的运动。
- F1aSh存储器在TMS320C3X系统中的应用(11-11)
- 基于PIC18F系列单片机的嵌入式系统设计(11-19)
- DSP在卫星测控多波束系统中的应用(01-25)
- 基于PCI总线的双DSP系统及WDM驱动程序设计(01-26)
- 利用Virtex-5 FPGA实现更高性能的方法(03-08)
- DSP与单片机通信的多种方案设计(03-08)