MIMO-GMC链路自适应方法及其DSP实现
时间:11-25
来源:互联网
点击:
3 链路自适应系统设计
东南大学研发的B3G试验系统上行链路采用了该算法。该系统载波频率为3.5 GHz,将20 MHz带宽分成若干个宽为1.28 MHz的子载波,频带中间的12个子载波用于数据传输,边带的子载波用做保护带,多载波的处理由多载波滤波器组完成。上行链路采用4发8收的结构,调制方式从QPSK和16QAM中选择,自适应支持12.5 Mbit/s~100 Mbit/s之间均匀的共8挡传输速率,自适应模式共有14种。
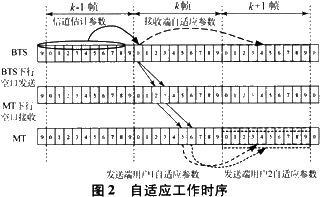
图2所示为自适应工作时序,包括两个高速用户,当基站侧在第K帧时,取得第K-2帧的9号时隙和第K-1帧的0~8号时隙的信道估计参数,通过这些参数更新信道统计信息,进行自适应计算。而计算得到的直接自适应参数用于第K+1帧的O~9号时隙的迭代干扰抵消和解码。同时,基站侧将统计信息和部分自适应控制参数分成用户1和用户2的两个部分,分别组人下行链路的空口2号和3号子时隙位置的控制数据部分,发送至移动台。移动台侧根据反馈的数据重建信道统计信息并重复部分接收端的计算过程,得到与接收端完全一致的自适应控制参数,用于控制第K+1帧O~9号时隙的数据发送。
基站链路自适应处理流程如图3所示。
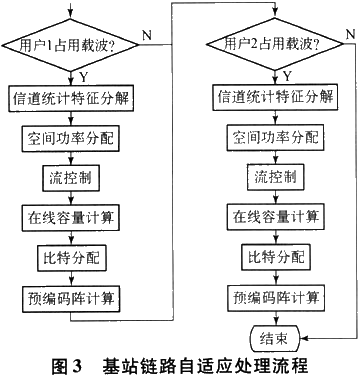
链路自适应处理都在基站侧完成,但是为了高效利用反馈链路,不可能直接把线性预编码阵反馈到移动台侧。而反馈信道发送自相关阵的增量,并在移动台侧恢复信道发送自相关阵后特征分解求线性预编码阵,可大大减小反馈的数据量,此方法有更大的优势。接收端自适应处理反映了详尽的自适应计算过程。
4 仿真和实验结果
试验系统载频工作在3.5 GHz,上行链路采用4发8收。帧长为8.375 ms,并把一帧划分为10个等长的时隙。仿真中采用了4发4收和4发8收,收发天线相关因子相同,分别是0和0.5,车速为5 km/h和120 km/h,信道模型为6径的Cost207,编码方式为l/2Turbo码,每个采样点为500帧的平均结果。
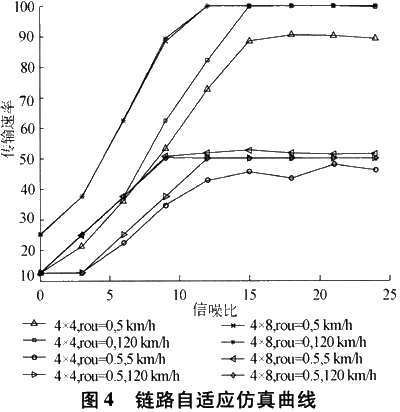
图4是仿真曲线。由图中可知,4收和8收有3 dB的差异。天线问的相关性直接影响信道独立流的个数,从而使高相关性的信道极大地降低了传输速率。5 km/s和120 knv/s的车速凸现了慢衰落和快衰落下的系统性能差异,在低车速下即使高信噪比仍然无法达到最高的传输速率。
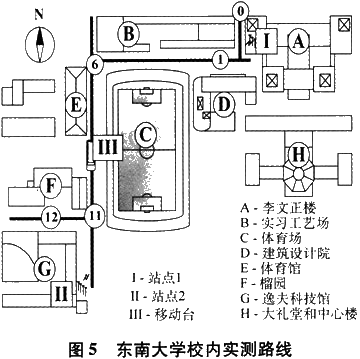
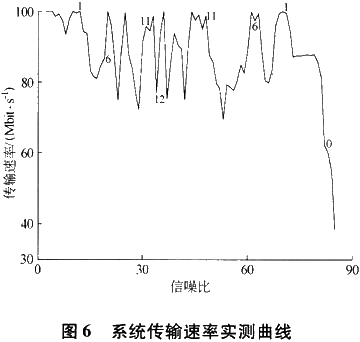
图5是实际外场测试路线及场景图。移动台首先静止在1号点,然后从1~12号点顺序遍历,在12号点掉头原路返回,最后在0号点停止。
图6显示了共85组实测数据,每组是500帧结果的平均。
5 结束语
仿真表明,该自适应算法能够在大动态范围内的信道变化下自适应调节系统传输速率,保证系统高效、稳定、可靠地工作。该自适应算法的DSP实现满足实时性要求,外场实测结果是试验系统能在测试环境中正常运行,可以达到100 Mbit/s的峰值传输速率。
东南大学研发的B3G试验系统上行链路采用了该算法。该系统载波频率为3.5 GHz,将20 MHz带宽分成若干个宽为1.28 MHz的子载波,频带中间的12个子载波用于数据传输,边带的子载波用做保护带,多载波的处理由多载波滤波器组完成。上行链路采用4发8收的结构,调制方式从QPSK和16QAM中选择,自适应支持12.5 Mbit/s~100 Mbit/s之间均匀的共8挡传输速率,自适应模式共有14种。
图2所示为自适应工作时序,包括两个高速用户,当基站侧在第K帧时,取得第K-2帧的9号时隙和第K-1帧的0~8号时隙的信道估计参数,通过这些参数更新信道统计信息,进行自适应计算。而计算得到的直接自适应参数用于第K+1帧的O~9号时隙的迭代干扰抵消和解码。同时,基站侧将统计信息和部分自适应控制参数分成用户1和用户2的两个部分,分别组人下行链路的空口2号和3号子时隙位置的控制数据部分,发送至移动台。移动台侧根据反馈的数据重建信道统计信息并重复部分接收端的计算过程,得到与接收端完全一致的自适应控制参数,用于控制第K+1帧O~9号时隙的数据发送。
基站链路自适应处理流程如图3所示。
链路自适应处理都在基站侧完成,但是为了高效利用反馈链路,不可能直接把线性预编码阵反馈到移动台侧。而反馈信道发送自相关阵的增量,并在移动台侧恢复信道发送自相关阵后特征分解求线性预编码阵,可大大减小反馈的数据量,此方法有更大的优势。接收端自适应处理反映了详尽的自适应计算过程。
4 仿真和实验结果
试验系统载频工作在3.5 GHz,上行链路采用4发8收。帧长为8.375 ms,并把一帧划分为10个等长的时隙。仿真中采用了4发4收和4发8收,收发天线相关因子相同,分别是0和0.5,车速为5 km/h和120 km/h,信道模型为6径的Cost207,编码方式为l/2Turbo码,每个采样点为500帧的平均结果。
图4是仿真曲线。由图中可知,4收和8收有3 dB的差异。天线问的相关性直接影响信道独立流的个数,从而使高相关性的信道极大地降低了传输速率。5 km/s和120 knv/s的车速凸现了慢衰落和快衰落下的系统性能差异,在低车速下即使高信噪比仍然无法达到最高的传输速率。
图5是实际外场测试路线及场景图。移动台首先静止在1号点,然后从1~12号点顺序遍历,在12号点掉头原路返回,最后在0号点停止。
图6显示了共85组实测数据,每组是500帧结果的平均。
5 结束语
仿真表明,该自适应算法能够在大动态范围内的信道变化下自适应调节系统传输速率,保证系统高效、稳定、可靠地工作。该自适应算法的DSP实现满足实时性要求,外场实测结果是试验系统能在测试环境中正常运行,可以达到100 Mbit/s的峰值传输速率。
- 适合单片机实时处理的简单FIR滤波器设计(06-30)
- 基于FPGA的分布式算法FIR滤波器设计(11-12)
- 数字匹配滤波器的优化设计与FPGA实现(11-26)
- 手机中ESD和EMI干扰及其解决方案(07-06)
- 便携式设备的EMC和ESD设计(09-08)
- 基于AVR的数字滤波器滤除工频干扰的快速算法实现(07-17)