基于FPGA的分布式算法FIR滤波器设计
0 引 言
FIR(finite impulse response)滤波器是数字信号处理系统中最基本的元件,它可以在保证任意幅频特性的同时具有严格的线性相频特性,同时其单位冲激响应是有限的,没有输入到输出的反馈,是稳定的系统。因此,FIR滤波器在通信、图像处理、模式识别等领域都有着广泛的应用。
目前FIR滤波器的硬件实现有以下几种方式:
一种是使用单片通用数字滤波器集成电路,这种电路使用简单,但是由于字长和阶数的规格较少,不易完全满足实际需要。虽然可采用多片扩展来满足要求,但会增加体积和功耗,因而在实际应用中受到限制。
另一种是使用DSP芯片。DSP芯片有专用的数字信号处理函数可调用,实现FIR滤波器相对简单,但是由于程序顺序执行,速度受到限制。而且,就是同一公司的不同系统的DSP芯片,其编程指令也会有所不同,开发周期较长。
还有一种是使用可编程逻辑器件,FPGA/CPLD。FPGA有着规整的内部逻辑块整列和丰富的连线资源,特别适合用于细粒度和高并行度结构的FIR滤波器的实现,相对于串行运算主导的通用DSP芯片来说,并行性和可扩展性都更好。
FIR滤波器的主要组成模块是乘累加单元(MAC),如果按照直观结构构造乘法器和系数寄存器来实现会占用大量的逻辑资源,显然不可取。本文采用基于分布式算法思想的方法来设计FIR滤波器,并在FPGA上实现。
1 分布式算法原理
分布式算法(distributed arithmetic,DA)最初是在1973年由Croisier提出的,但直到Xilinx发明FPGA的查找表以后,DA算法才在上世纪90年代初重新受到重视,并有效地应用在FIR滤波器的设计中。DA算法的原理如下。
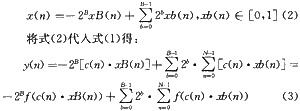
一线性时不变网络的输出为:

假设c(n)为已知常系数,x(n)是变量,用(B+1)位2进制补码表示为:
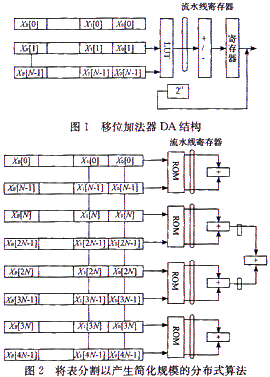
函数f(c(n),xb(n))的实现方法是利用一个LUT(查找表)实现影射f(c(n),xb(n)),也就是说2N字宽、预先设定程序的LUT接收一个N位输入向量xb=[xb[0],xb[1]…xb[N-1]],输出为f(c(n),xb(n)),个个影射,f(c(n),xb(n))都由相应的二次幂加权并累加。对于固定系数,整数乘以2b即左移6位,可以通过硬连线实现,不占用逻辑资源,利用图1所示的移位加法器就能有效地实现累加。DA算法的主要特点是巧妙利用SRAM查找表将固定系数的MAC运算转化为查表操作,其运算速度不随系数和输入数据精度的增加而降低,而且相对直接实现乘法器和系数寄存器在逻辑资源占用上得到了极大的改善。缺点是查找表的大小随滤波器的阶数的增加呈指数增长,这时可以采用将大查找表分解为小查找表的方法来降低逻辑资源的消耗,如图2所示。
2 FIR滤波器的网络结构
N阶FIR滤波器相对于输入时间序列x(n)的输出表达式为:

即输出序列为单位脉冲相应h(n)与输入x(n)的卷积,由卷积关系可直接画出结构图,称之为直接型结构,如图3所示,该结构中共需要N个乘法器。

对于线性相位FIR滤波器,其单位取样响应是对称或反对称的,即:

利用对称性可以简化网络结构,当h(n)为偶对称且N为偶数时,
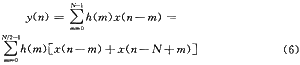
其线性网络结构如图4所示,仅需N/Z个乘法器。

3 FIR滤波器的硬件电路设计
下面以一个32阶FIR带通滤波器为例说明硬件电路设计的方法和过程。
3.1 设计指标
采用频率:200 Hz 类型:带通
上限截止频率:54.3 Hz 下限截止频率:46 Hz
阶数:32阶 系数数据宽度:16位
输入数据宽度:16位 输出数据宽度:16位
3.2 滤波器的设计
使用MATLAB 7.1软件中Filter Design&AnalysisTool,选取带通滤波器,Kaiser窗设计方法,设计出符合设计指标的32阶线性相位FIR滤波器,其幅频特性和相频特性如图5所示。

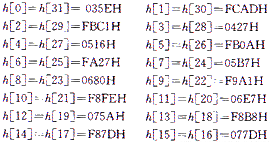
滤波器的特征参数用16位二进制补码表示如下:
3.3 硬件电路组成单元
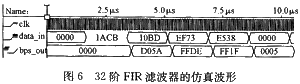
FIR滤波器的硬件电路包括数据位扩展、并串转换器、移位寄存器组、预相加单元、查找表单元、查表结果相加单元、移位累加单元、锁存输出单元、控制单元等,总的结构如图6所示。
(1) 数据位扩展:由于输入数据要进行预相加,为了防止溢出,保证电路正常工作,采用符号位扩展,使输入数据由16位增加到17位。
(2) 并串转换器:由于电路以串行方式工作,须将并行输入的数据转换为串行数据输入,且顺序是先输入低位(LSB),后输入高位(MSB)。
(3) 移位寄存器组:其主要功能是用寄存器组存储输入序列,实现输入数据的延时输出,存储的级数等于FIR滤波器的阶数减1,即31。移位寄存器组输出的数据和并串转换器输出的数据一起形成如图1中所示的输入数据阵列形式。
(4) 预相加单元:利用FIR滤波器系数的对称性,按照图4所示的FIR滤波器线性网络结构,将相同滤波器系数相
- 一种基于FPGA的接口电路设计(11-18)
- 利用Virtex-5 FPGA实现更高性能的方法(03-08)
- 设计性能:物理综合与优化(04-28)
- 使用 PlanAhead Design 工具提高设计性能(04-28)
- 采用灵活的汽车FPGA 提高片上系统级集成和降低物料成本(04-28)
- 面向 FPGA 的 ESL 工具(04-29)